Electromagnetic log assisted AUV multi-program parallel solution navigation method
A navigation method and the technology of a speed log, which are applied in navigation, surveying and mapping and navigation, navigation calculation tools, etc., can solve the problems that GPS signals are susceptible to external interference, cannot meet concealed tasks, and have high costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
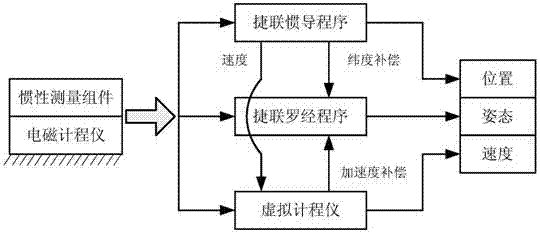
[0058] The present invention comprises the following steps:
[0059] Step 1: Install the inertial measurement component and the electromagnetic log on the AUV, and continuously collect the output data of the gyroscope, accelerometer, and electromagnetic log after fully warming up.
[0060] Step 2: Use the collected gyroscope and accelerometer data to run the strapdown inertial navigation program, and output the calculated velocity and position of the AUV.
[0061] Step 3: After the speed calculated by the strapdown inertial navigation program and the speed measured by the electromagnetic log are processed by the virtual log, the optimized speed information is output.
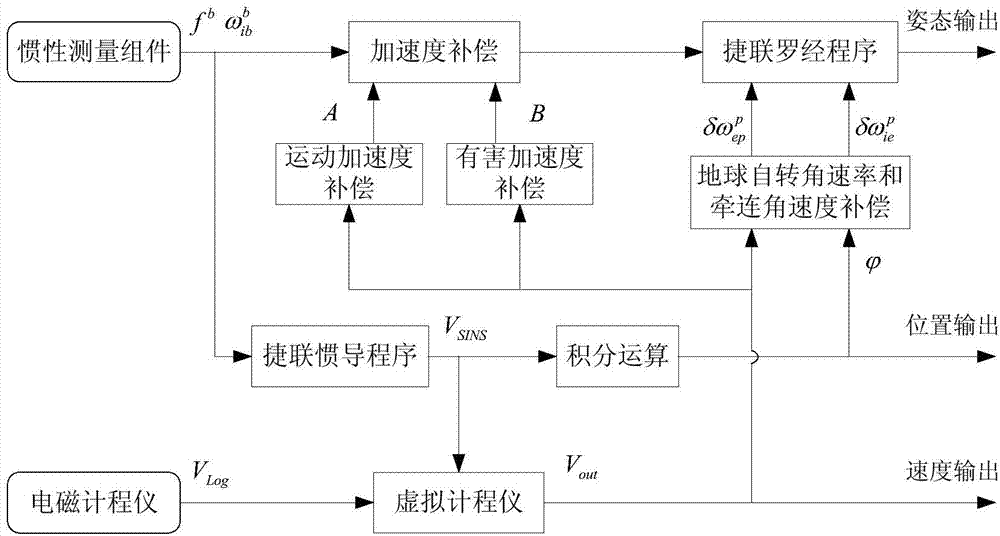
[0062] The function of the virtual log is to comprehensively process the speed measured by the electromagnetic log and the speed calculated by the strapdown inertial navigation program to obtain the optimized AUV water speed.
[0063] V Log =V AUV -V current +δV Log
[0064] V SINS =V AUV +δV SINS
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com