Binocular Stereo Vision Automatic Measurement Method Based on Parallax Optimization Algorithm
A technology of binocular stereo vision and parallax optimization, applied in measuring devices, calculations, image data processing, etc., can solve problems such as increased labor costs, inaccuracies, and complicated steps, achieve complete 3D point cloud information, expand application prospects, The effect of simplifying the operation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0029] The automatic measurement method of binocular stereo vision based on parallax optimization algorithm includes the following steps:
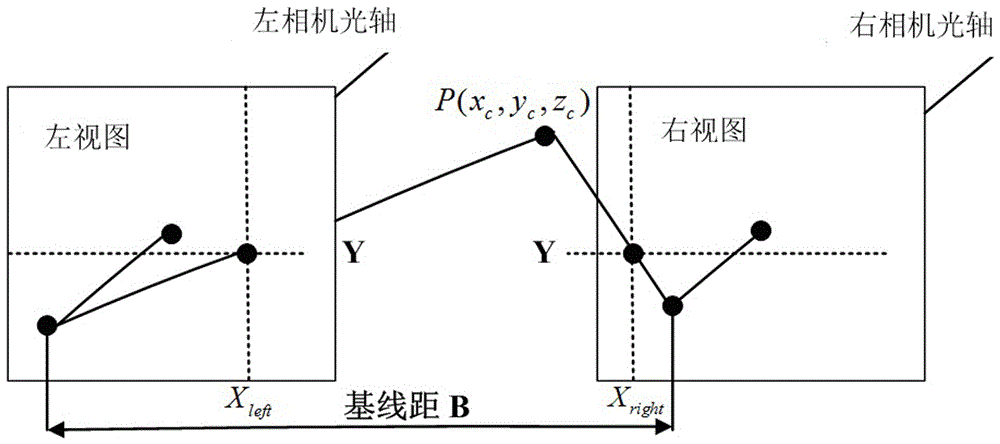
[0030] 1) Simultaneously obtain two RGB color images through the binocular camera, use the chessboard calibration method to perform binocular calibration on the binocular camera, obtain the internal and external parameters of the two binocular cameras, and perform binocular correction on the binocular view according to these parameters. , remove the fisheye effect of the lens and the influence of position error, and obtain the corrected binocular view;
[0031] The binocular camera is a dual-channel video capture device combined with two cameras of the same specification to simulate two human eyes, and the acquired picture pixels are set to 640x480 pixels, keeping the original RGB picture;
[0032] After adjusting the binocular camera and collecting two RGB images, use the black and white checkerboard to calibrate it. The camera has radial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com