Bionic robot control method and bionic robot control device
A technology of a bionic robot and a control method, which is applied in the field of the control method and device of the bionic robot, can solve the problems of complicated programming and poor adaptability, and achieves the effects of high product accuracy, convenient operation and hands-on teaching.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
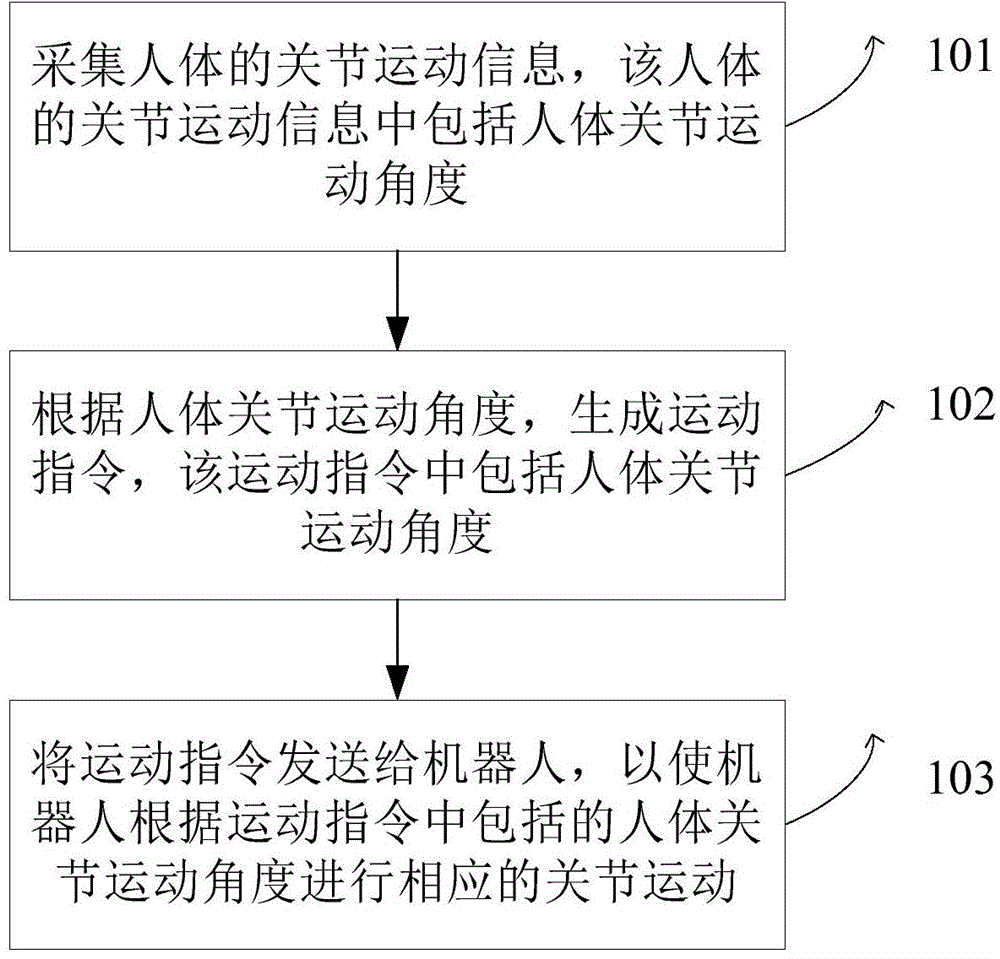
[0037] see figure 1 , the embodiment of the present invention provides a bionic robot control method, the method flow provided by the embodiment of the present invention includes:
[0038] 101: Collect joint movement information of the human body, where the joint movement information of the human body includes the joint movement angle of the human body.
[0039] 102: Generate a motion command according to the motion angle of the human body joint, where the motion command includes the motion angle of the human body joint.
[0040] 103: Send the motion command to the robot, so that the robot performs corresponding joint motion according to the joint motion angle of the human body included in the motion command.
[0041] Preferably, after sending the motion instruction to the robot so that the robot performs corresponding joint motion according to the motion angle included in the first motion instruction, it also includes:
[0042] Collect the joint motion information of the ro...
Embodiment 2
[0051] The embodiment of the present invention provides a control method of a bionic robot, and the method flow provided by the embodiment of the present invention includes:
[0052] 201: Collect joint movement information of the human body, where the joint movement information of the human body includes the joint movement angle of the human body.
[0053]For this step, in order to enable the subsequent robot to imitate the joint motion of the human body according to the joint motion information of the human body, it is necessary to collect the joint motion information of the human body. However, since the robot needs to perform corresponding imitation actions according to the joint motion angle of the human body during actual operation, the joint motion information includes the joint motion angle of the human body. The embodiment of the present invention does not specifically limit the manner of collecting the joint motion information of the human body, but in specific implem...
Embodiment 3
[0073] The embodiment of the present invention provides a control device for a bionic robot, and the device provided by the embodiment of the present invention includes:
[0074] The first collection module is used to collect joint movement information of the human body, and the joint movement information of the human body includes the joint movement angle of the human body;
[0075] The first generation module is used to generate a motion command according to the motion angle of the human body joint, and the motion command includes the motion angle of the human body joint;
[0076] The first sending module is used to send the motion command to the robot, so that the robot performs corresponding joint motion according to the human body joint motion angle included in the motion command.
[0077] Preferably, the device also includes:
[0078] The second collection module is used to collect the joint motion information of the robot, and the joint motion information of the robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com