Scheduling method and system for multiple patrol robots
A patrol robot and scheduling method technology, applied in the field of robots, can solve the problems of target area monitoring, inability to meet the security needs of patrol robots, and inability to intuitively grasp the scene of emergencies, and achieve the effect of timely monitoring.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
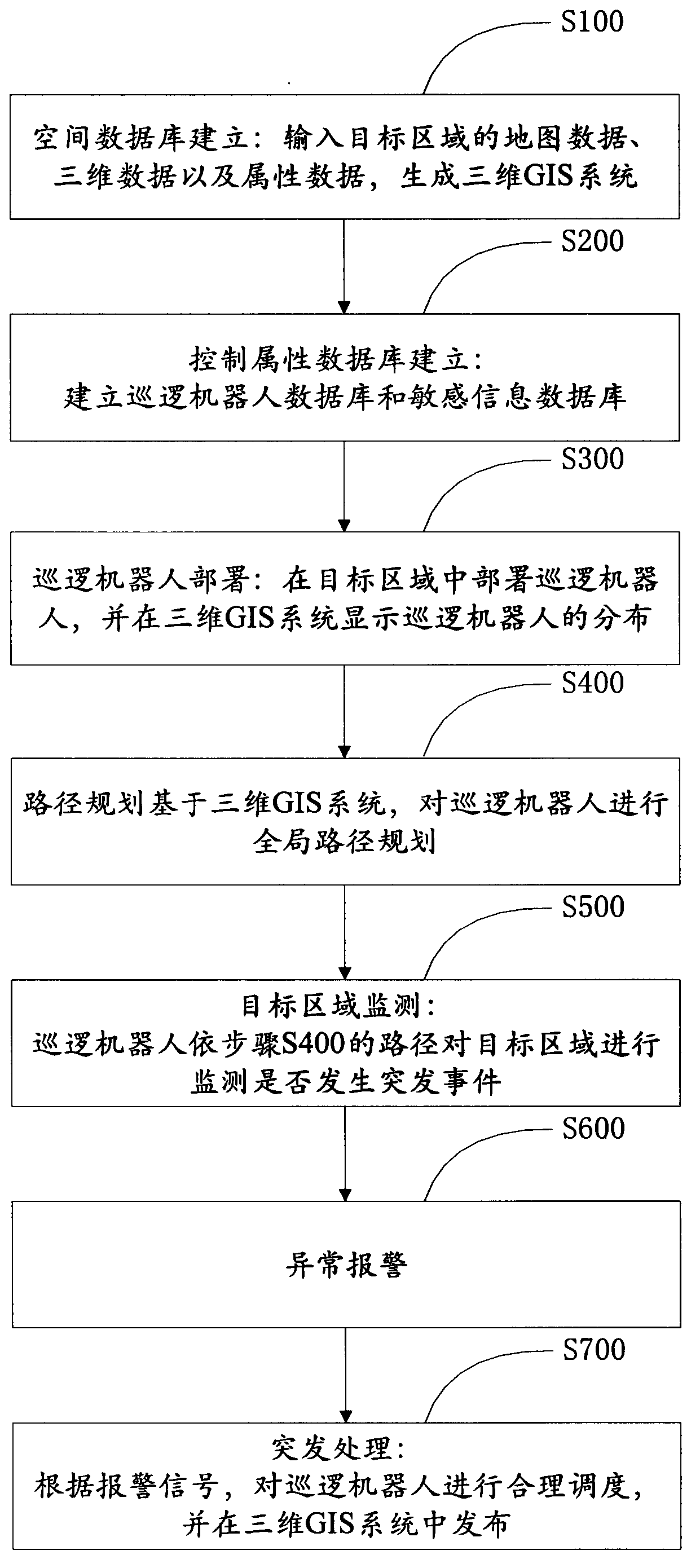
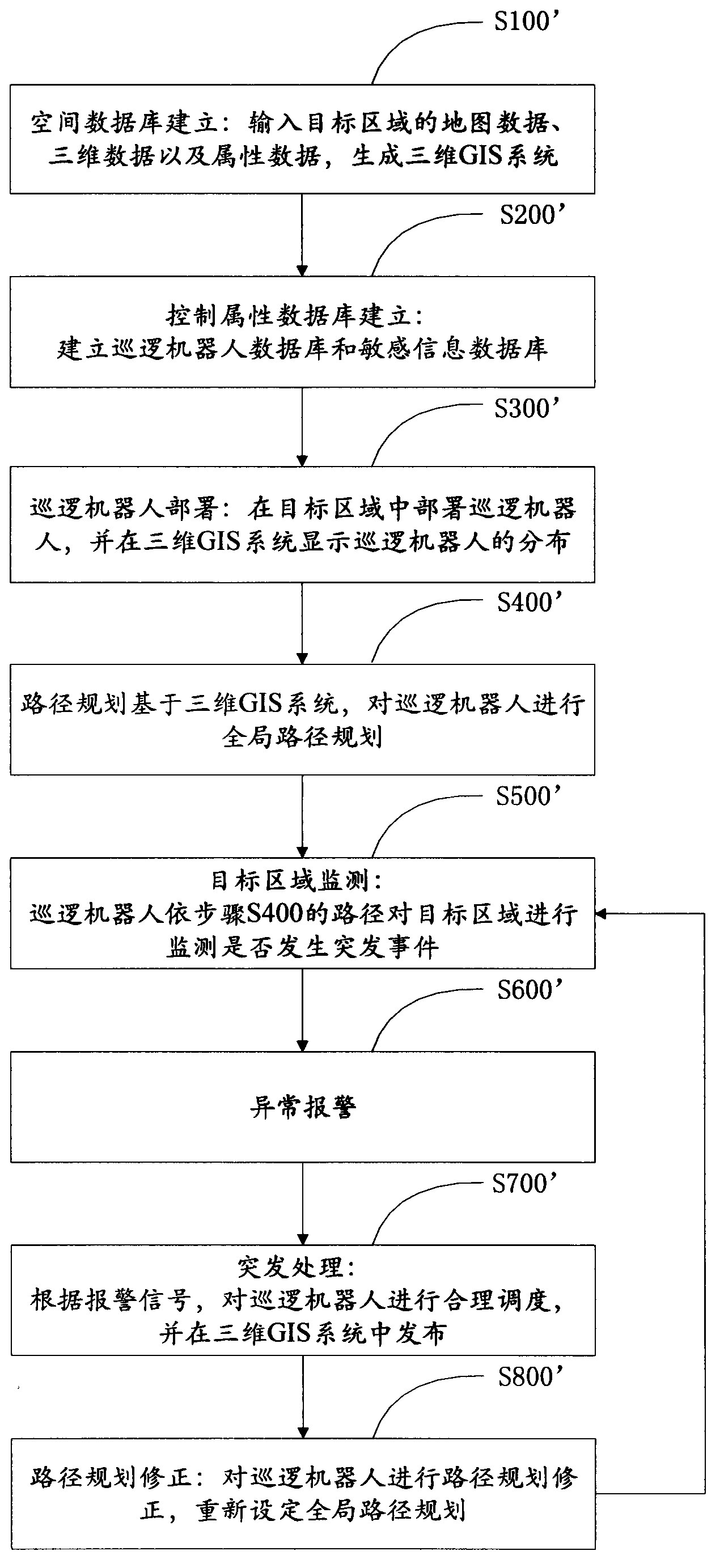
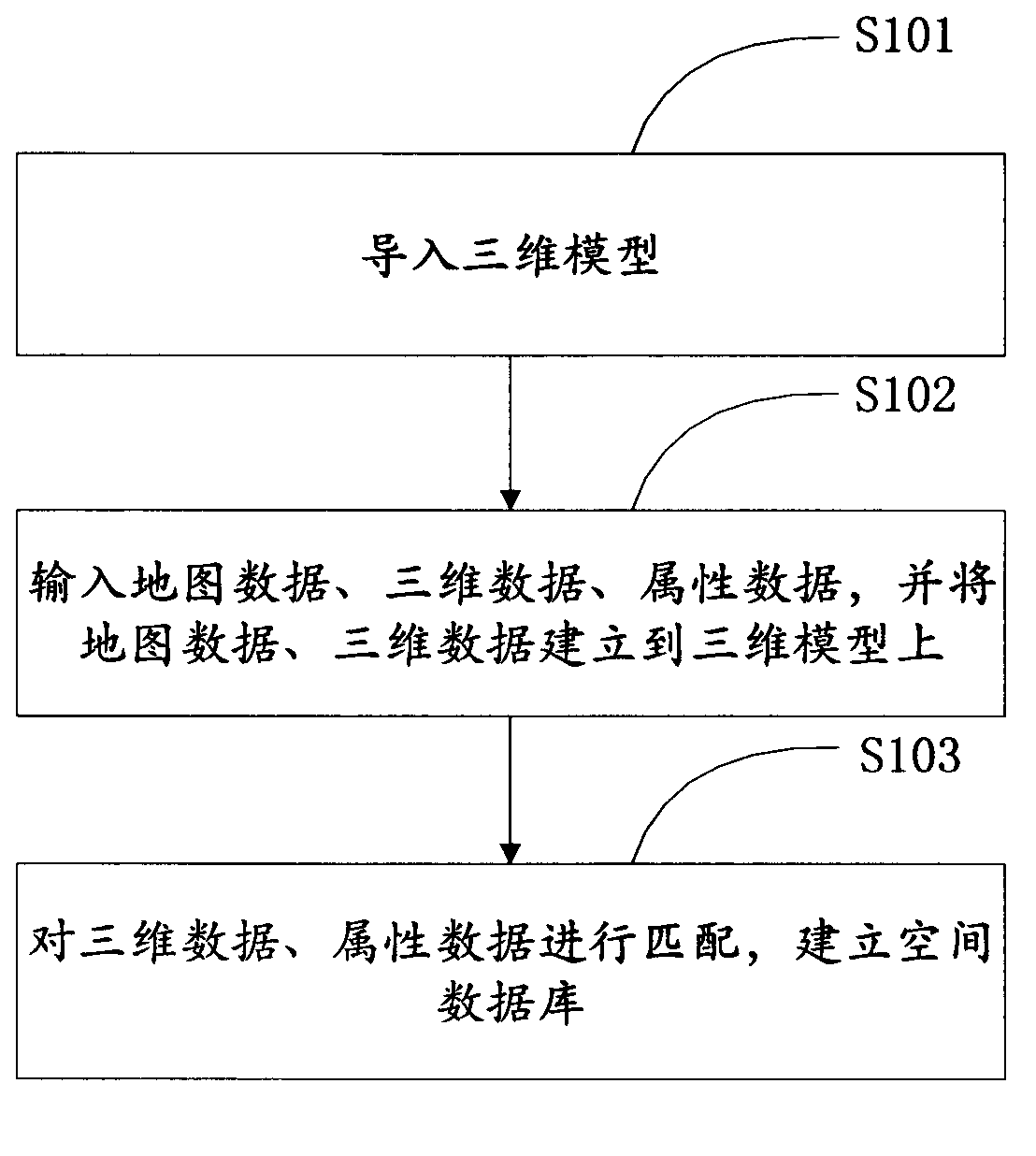
[0064] The multi-patrol robot scheduling method provided by the present invention is used in a multi-patrol robot management scheduling system, mainly including establishing a spatial database based on map data, three-dimensional data and attribute data of the target area; establishing a patrol robot database and a sensitive information database; Deploy patrol robots in the area; plan the global path of the patrol robots; monitor the target area for emergencies; according to the detected emergencies, the patrol robots send alarm signals to the control room; finally, according to the alarm signals, Patrol robots are dispatched reasonably and published in the 3D GIS system.
[0065] Using the scheduling method of multiple patrol robots provided by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com