Method for carrying out early warning on trampling and damage degree of lawn
A technology of hazard degree and lawn, applied in the field of computer vision monitoring, it can solve the problems of single monitoring results and large investment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0076] This embodiment realizes the whole process of installation and parameter initialization of an early warning method for lawn trampling and damage.
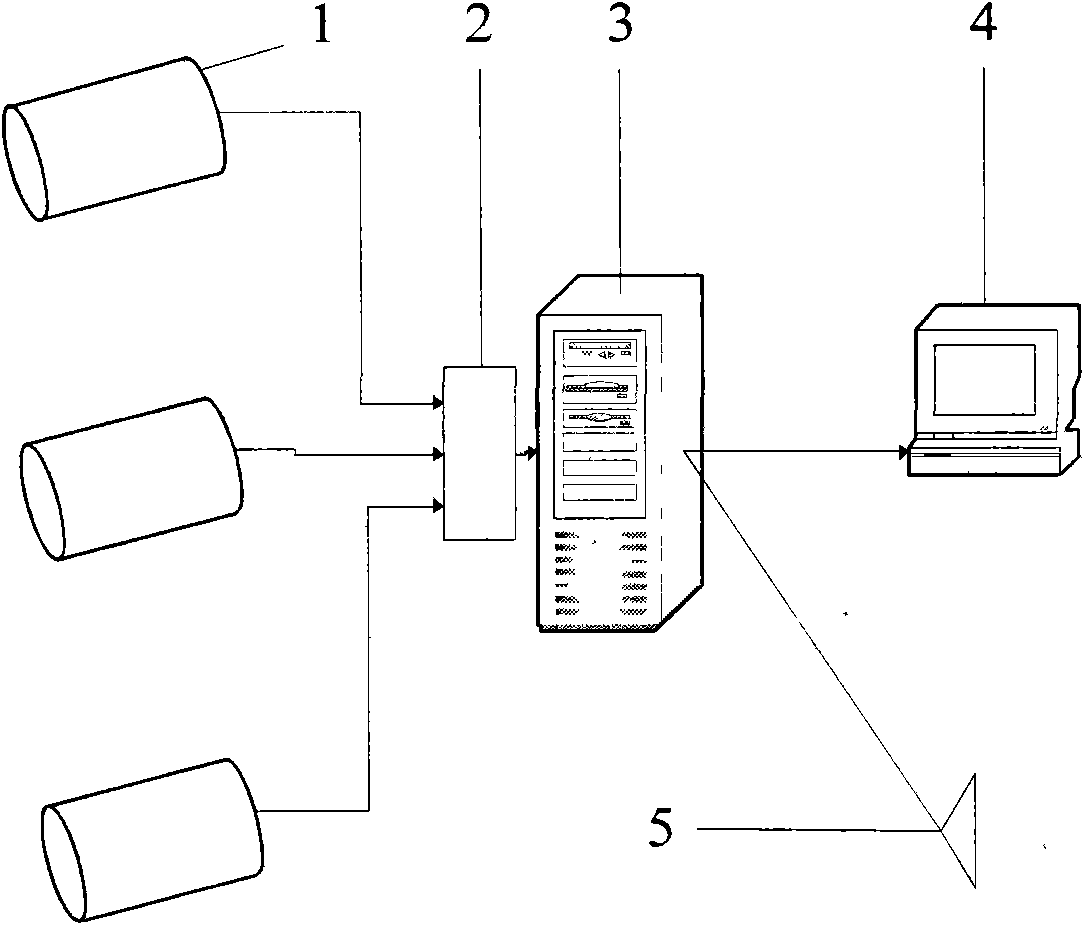
[0077] 1. Placement of equipment: The monitoring camera is placed on a high place of the building so that the monitoring area can cover the monitored lawn. Through multiple groups of cameras, the purpose of covering the entire grassland of the park or scenic area can be achieved; the above The monitoring camera needs to be connected to the corresponding BNC interface of the video capture card by its own BNC interface through an ultra-long BNC connecting line; the video capture card is connected to the monitoring host through the PCI interface, so that the monitoring host Can read the video signal that monitoring camera is gathered; Described display is connected with monitoring host through VGA interface (or DVI interface, depending on the interface that monitoring host provides); The audio interface is connected with the 3....
Embodiment 2
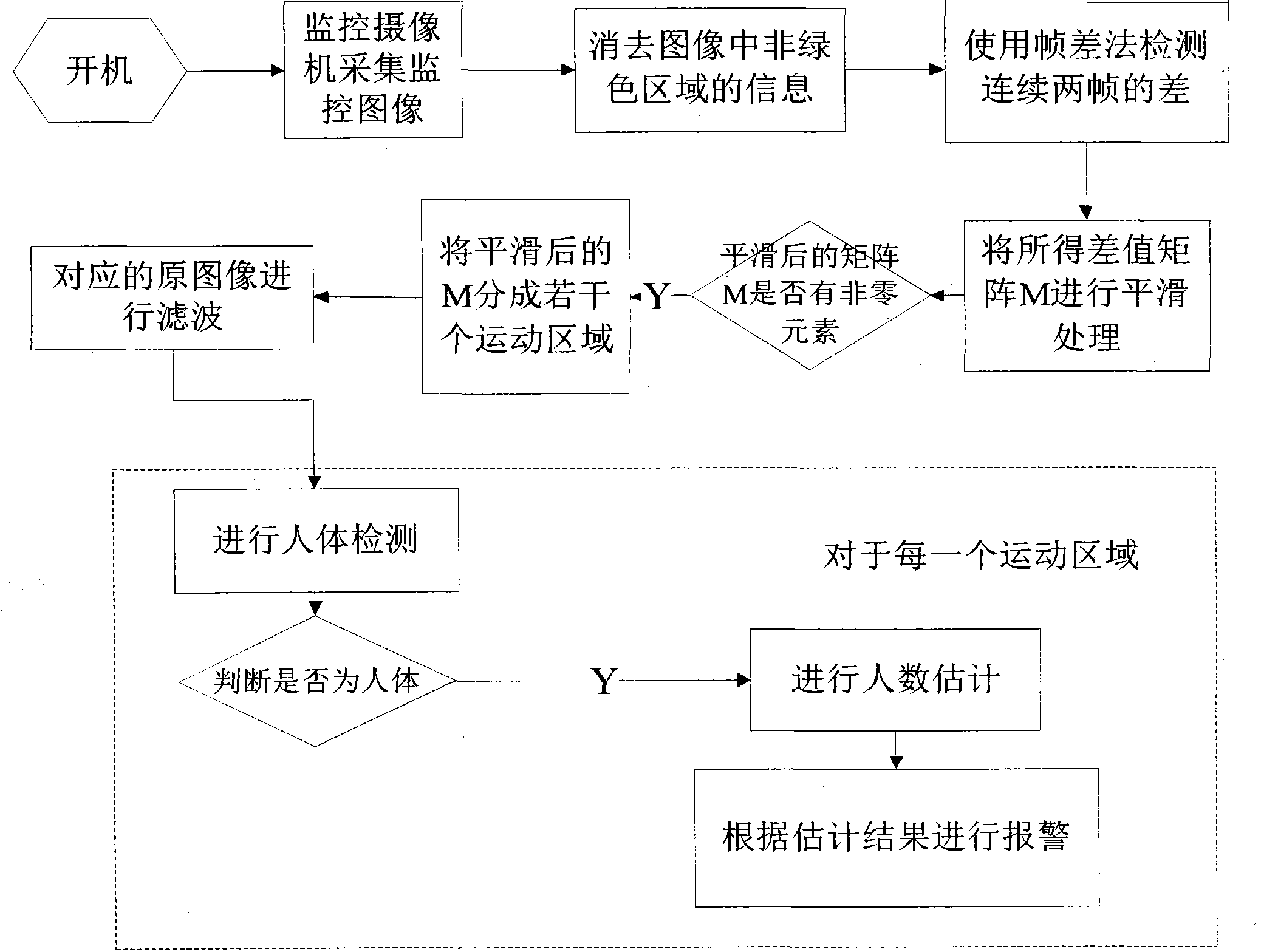
[0113] This embodiment realizes the whole process of early warning of a method for early warning of lawn trampling and damage degree.
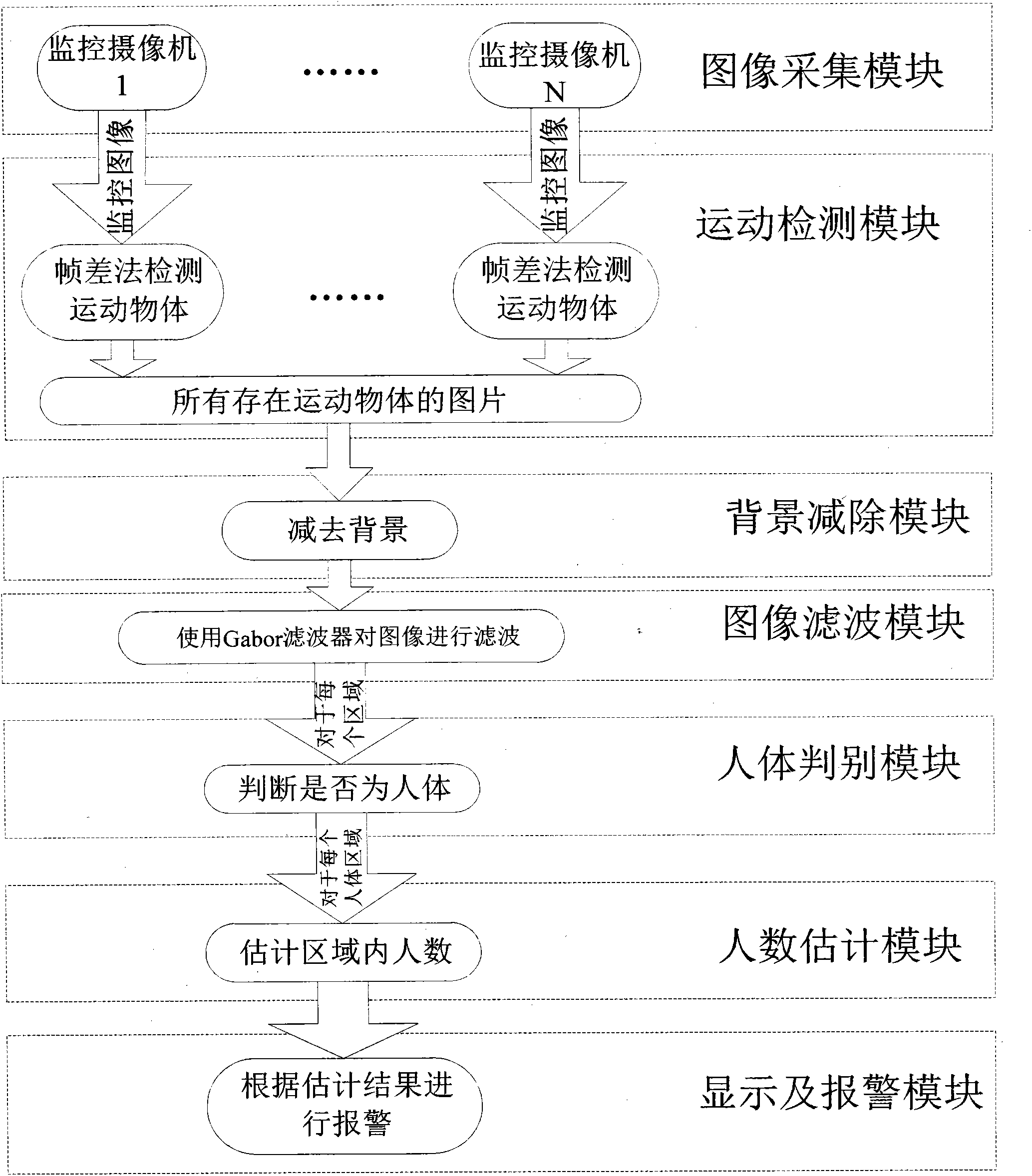
[0114] 1. The image acquisition module uses a surveillance camera to monitor the monitoring area. Since the movement of pedestrians does not change much within a second, the image acquisition interval can be set to more than 1 second, thereby reducing the system load.
[0115] 2. The motion detection module first sends the rgb image matrix X delivered by the image acquisition module rgb Convert to grayscale image matrix X gray , the rgb image matrix, each pixel has three values r: red, g: green, b: blue, the range is 0 to 255, the conversion formula is: 0.299×r+0.587×g+0.114× b; secondly, use the matrix M saved by the background subtraction module 1 with X gray The corresponding elements in are multiplied, and the resulting mark is X marked , so that X gray The non-green area in the center is set to 0. Finally, the frame difference meth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com