Mark point automatic registration method based on model matching
A model matching and automatic registration technology, which is applied in the field of surgical navigation, can solve problems such as slow registration speed, errors, and complex algorithm processes, and achieve the effects of reducing registration time, reducing registration errors, and improving simplicity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
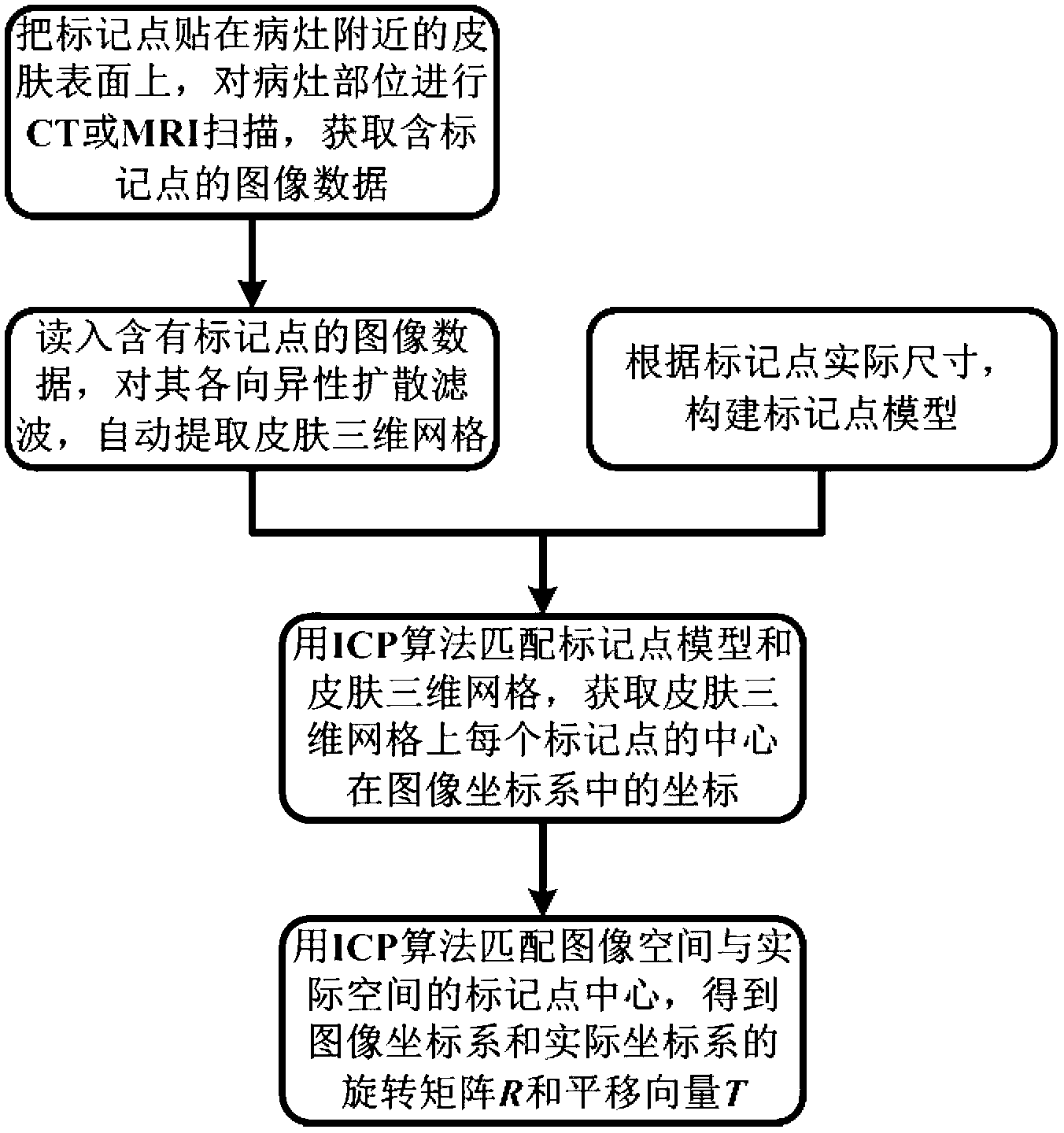
[0031] Such as figure 1 and figure 2 As shown, the marker registration method of this embodiment includes the following steps:
[0032] 1) Obtain image data containing markers: stick markers on the skin surface near the patient's lesion, usually 8 to 10 markers, and scan the lesion with computed tomography (CT) or magnetic resonance imaging (MRI) , to obtain image data containing marker points;
[0033] 2) Build a marker point model: according to the actual size of the marker point described in step 1), take the center of the marker point as the coordinate origin, establish a coordinate system, build a triangular mesh, and obtain the marker point model, such as Figure 3a and Figure 3b shown;
[0034] 3) Read in the image data obtained in step 1), perform three-dimensional anisotropic diffusion filtering on it, and automatically extract it from the image: first, calculate the gray threshold value of the skin, and process the image binarization; secondly, use mathematical...
Embodiment 2
[0061] Taking the head MRI image as an example, the specific process of step 3) is as follows:
[0062] 3.1) Read in head MRI image data containing marker points, such as Figure 7a and Figure 7b As shown, the image is subjected to three-dimensional anisotropic diffusion filtering;
[0063] 3.2) Calculating the gray threshold of the skin, and binarizing the image. First, using the medical software BrainSuite3 to obtain brain labeled images (B mark ), and then obtain non-brain tissue images (I nb ), take the pixel whose gray value is greater than zero, find the average value of its gray value, and use T 1 Indicates that the calculation formula is:
[0064] T 1 = Σ i ∈ X NB V i / Σ i ∈ X ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com