Fuzzy fusion method for force feedback of vascular intervention surgical robot
A robotic system and interventional surgery technology, applied in the field of medical devices, can solve the problems of high risk and time-consuming operation, and achieve the effect of actual relationship
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
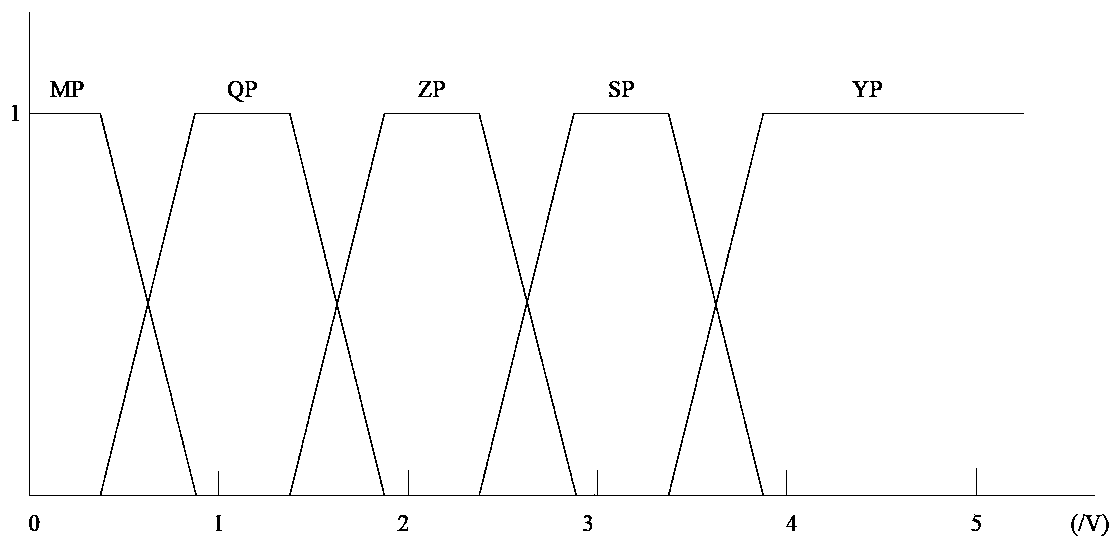
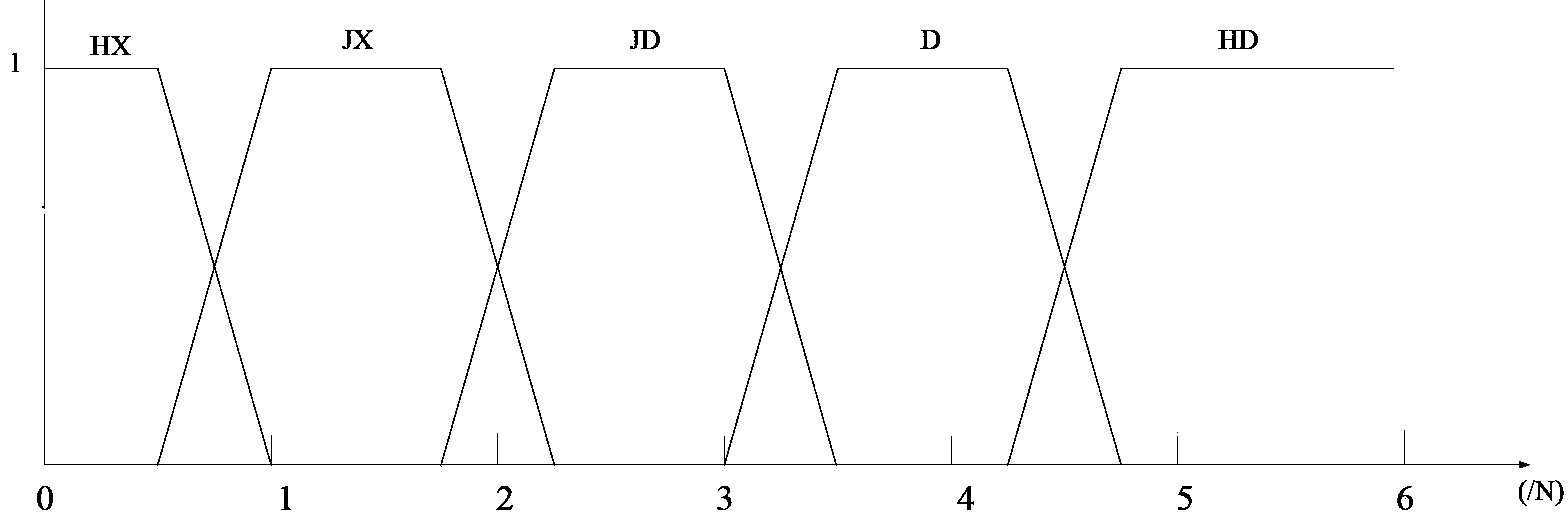
[0057] The invention provides a fuzzy fusion method for force feedback of a robot system for vascular interventional surgery. In the fuzzy fusion method, an optical fiber pressure sensor is selected to measure the collision force at the front end of the catheter; by coating the side wall of the catheter with conductive rubber The sensor uses the piezoresistive effect of conductive rubber to measure the interaction between the side wall of the catheter and the wall of the blood vessel. The optical fiber pressure sensor converts the pressure signal into an analog voltage signal through the signal processor, and at the same time, the conductive rubber sensor also converts the resistance signal into an analog voltage signal through the bridge circuit, both of which are output at a voltage value of 0-5V. The main-end computer uses multi-thread technology t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com