Gait rehabilitation training robot
A rehabilitation robot and gait training technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve problems such as few, mechanism design, and immature computer control of modular design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
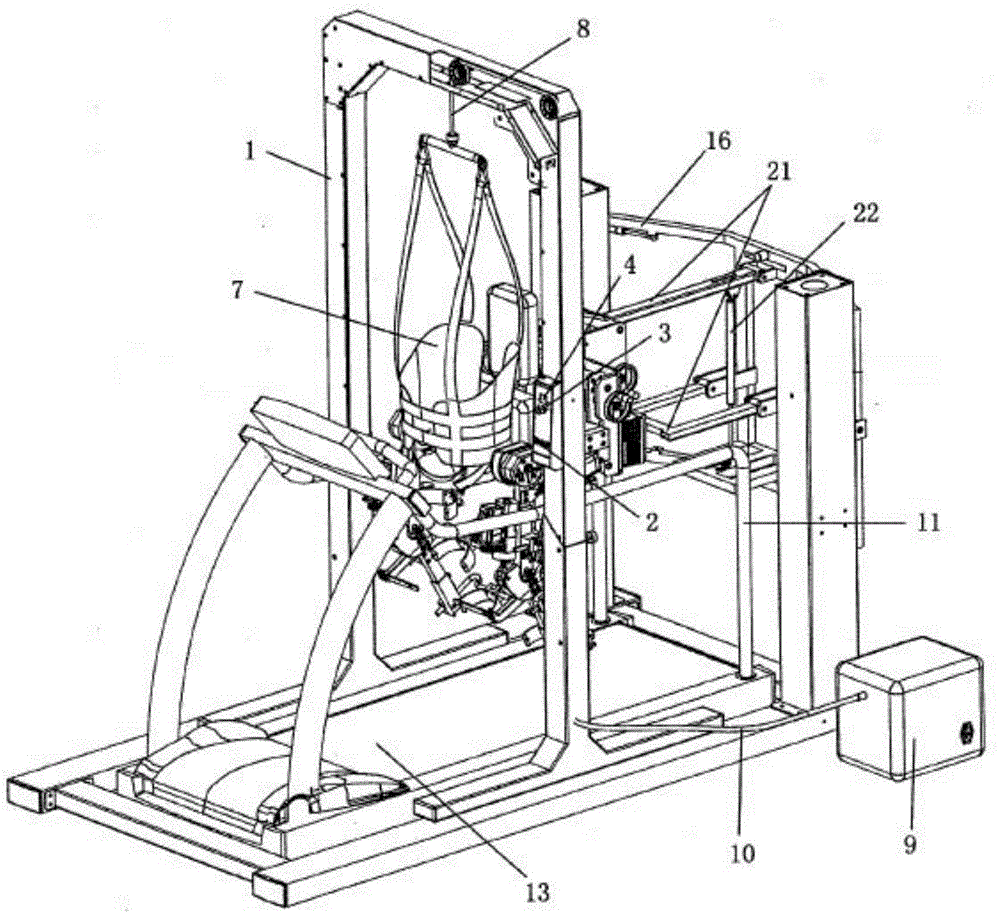
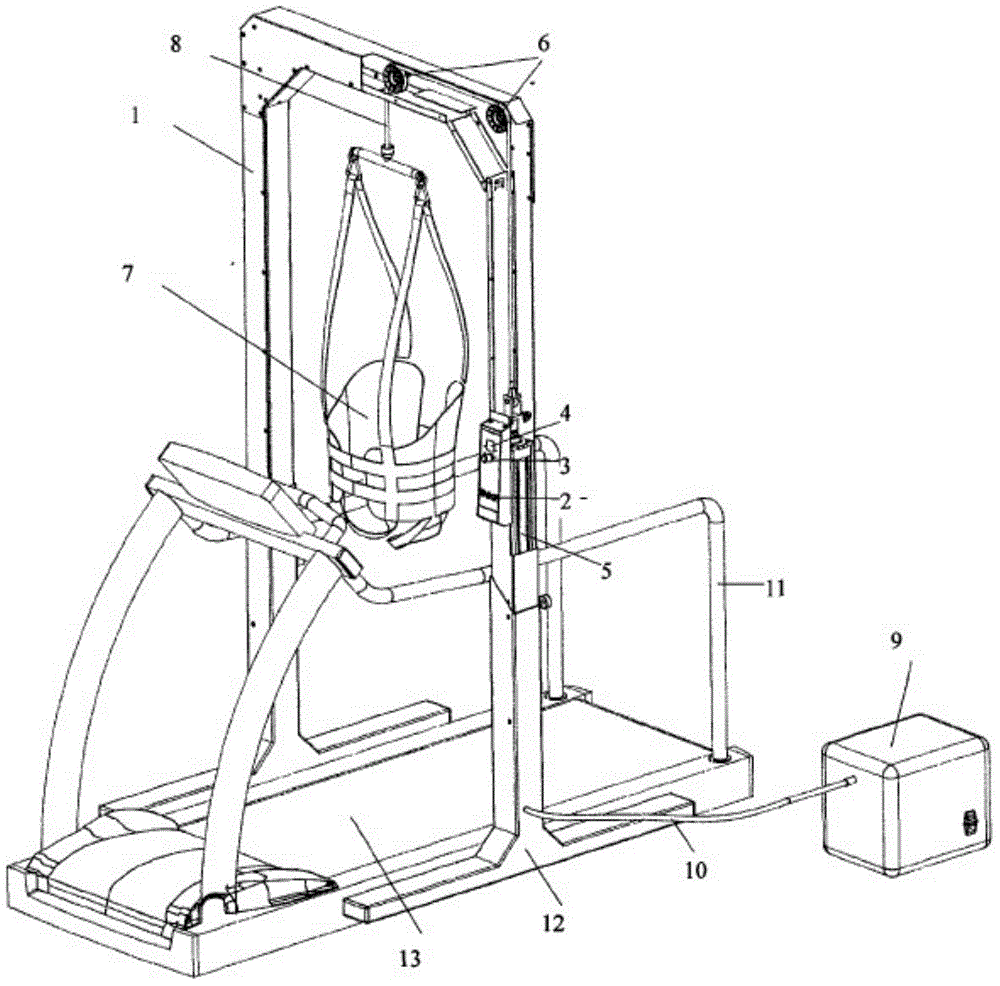
[0008] In order to achieve the above object, the present invention adopts the following technical solutions. The lower limb rehabilitation training robot with biofeedback and intelligent step adjustment includes a pneumatic weight reduction system, a lower limb training device and a microcomputer control system.
[0009] Pneumatic weight reduction system: including frame 1, air pressure switch 2, air pressure regulating valve 3, air pressure gauge 4, cylinder 5, pulley block 6, strap 7, cable 8, compressor 9, PVC hose 10, handrail 11, fixed bracket 12. Running platform 13.
[0010] Cylinder 5 is fixed on one side of the frame, and the telescopic end of cylinder 5 is connected to cable 8, and cable 8 is transferred to the hole at the top of frame 1 through pulley block 6 and then connected to strap 7; handrail 11 is installed on the treadmill 13, the frame 1 is fixed on the fixed bracket 12; the air pressure switch 2, the air pressure regulating valve 3 and the air pressure ga...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com