Simulation method and system of general unmanned aerial vehicle based on nonlinear mathematical model
A mathematical model and simulation system technology, applied in the field of UAV mathematical model construction, can solve the problems of increasing the modeling workload, long cycle, unable to support two coordinate systems at the same time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0093] Such as Figure 1-Figure 5 As shown, this embodiment relates to a general-purpose UAV simulation method based on a nonlinear mathematical model, which mainly includes three method modules: model solution, dual coordinate system support, and CMEX packaging. The specific steps are as follows:
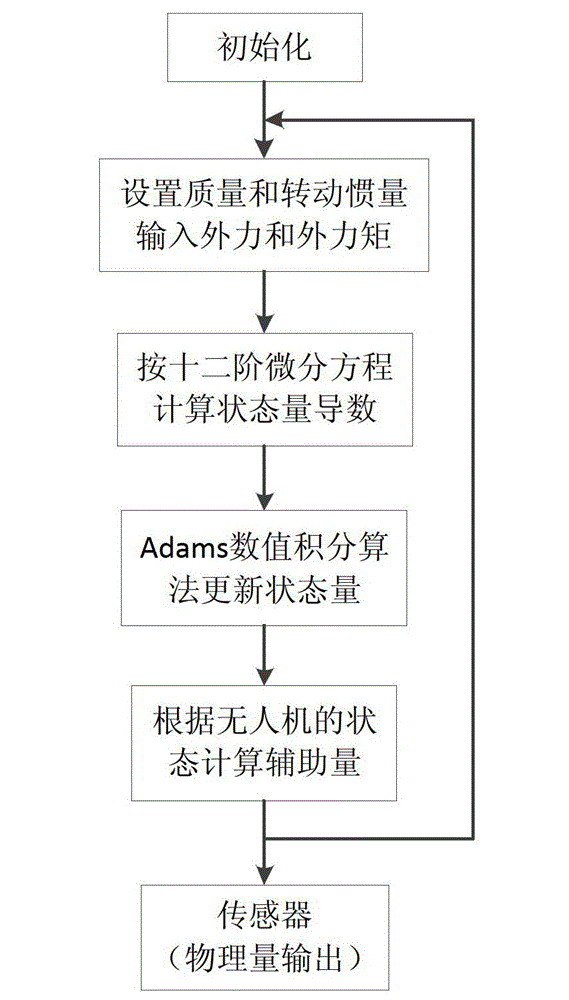
[0094] Step 1: Call the user interface function provided by the general model software to initialize the motion state of the drone;
[0095] In this embodiment, two initialization methods are designed: initializing the component of the ground speed in the body coordinate system and initializing the component of the ground speed in the geographic coordinate system. The user is allowed to select one of them for initialization, and the software program automatically completes the initialization of the other speed through the transformation matrix between the body coordinate system and the geographic coordinate system provided in the model.
[0096] Step 2: Set the mass and moment of ...
Embodiment 2
[0177] This embodiment relates to a simulation system for implementing the simulation method described in Embodiment 1, such as Figure 6-Figure 8 shown, which includes:
[0178] Simulation system input module 1;
[0179] Carry out the initialization module 2 of unmanned aerial vehicle movement state initialization;
[0180] State Quantity Derivative Calculation Module 3;
[0181] Status update module 4;
[0182] Auxiliary physical quantity calculation module 5;
[0183] Simulation system output module 6;
[0184] Among them, the state parameters of the UAV are input into the initialization module 2 through the simulation system input module 1, and the initialization module 2 processes the initial state information of the UAV and inputs the processing result into the initialization state quantity update module 4; The external force and external moment are input to the state quantity derivative calculation module 3 through the simulation system input module 1, and the stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com