Charging butt joint and separation device for inspection robot and solar charging base station
A technology of a line patrol robot and a charging base station, which is applied to battery circuit devices, circuit devices, components of connecting devices, etc., can solve the problems of low docking efficiency, docking reliability, docking failure, etc., and achieves high efficiency and low cost. , docking simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
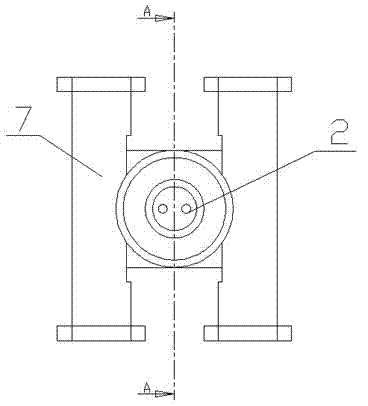
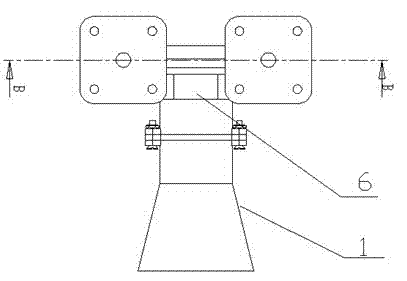
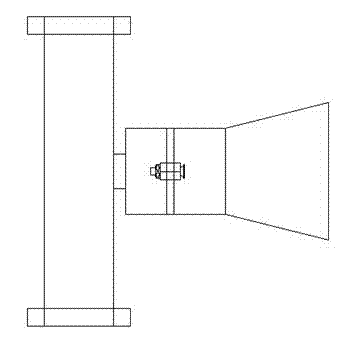
[0028] The device includes a charging base mechanism and a docking deviation self-adaptive mechanism. The device is installed on the suspension clamp 19 on the high-altitude transmission line 18 through the device box 16 and the support frame 17, and is connected with the solar automatic charging base station body 22 installed on the pole tower 23 through the cable 20. When the line patrol robot 21 traveling along the high-altitude power transmission line needs to be charged, the robot 21 moves along the power transmission line 18 and the charging head installed on its mechanical arm is docked with the device. After charging, the robot moves and installs on its mechanical arm. The charging head on the device is detached from the device. The line patrol robot traveling along the high-altitude transmission line can be selected from the patent No.: 200410061316.8, the name is: a robot traveling along the overhead high-voltage transmission line, and the application date is the rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com