Air vehicle full-parameter navigation method based on sequence image and reference image matching
A technology of sequential image and navigation method, applied in the field of full parameter measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
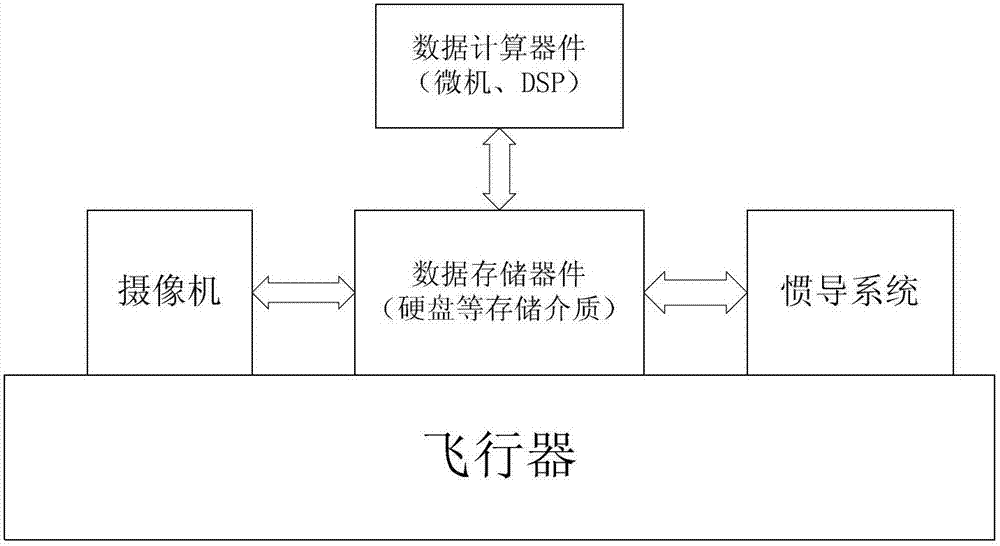
[0050] Such as figure 1 , the aircraft full-parameter navigation system based on scene matching is composed of a camera installed on the aircraft, an inertial navigation system, data processing devices (microcomputer, DSP) and storage devices (hard disk and other storage media). Among them, the camera is used for real-time imaging of the ground, the inertial navigation system is used to provide matching prediction and integrated navigation input, the data processing device is used for image matching, aircraft pose calculation and Kalman filter calculation of integrated navigation, and the storage device is used for storage Imagery and computed result data, including pre-stored datum maps with geodetic coordinates and elevations.
[0051] Such as figure 2 , select multiple feature points on the real-time map, match them with the reference map to obtain the three-dimensional absolute geodetic coordinates of the feature points, use the known camera internal parameters and insta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com