Off-running method for crane and system
A crane and jib technology, applied in the field of crane collection methods and systems, can solve the problems of lack of intelligent collection methods and systems, and achieve the effect of reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
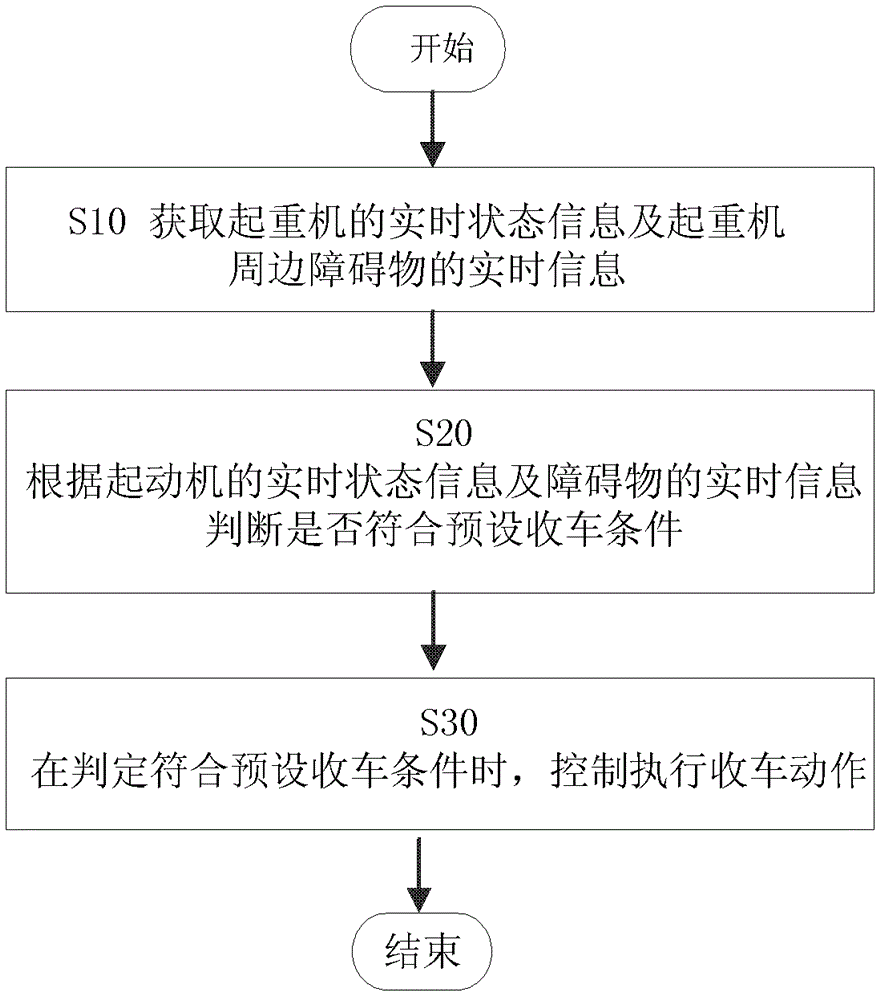
[0031] Such as figure 1 As shown, the first embodiment of the crane receiving system of the present invention includes:
[0032] Step S10: Obtain real-time status information of the crane and real-time information of obstacles around the crane;
[0033] Among them, the real-time status information of the crane may include: first real-time status information for determining the position of the main / auxiliary hook, second real-time status information for determining the load status of the main / auxiliary hook, and second real-time status information for determining the status of the boom. 3. Real-time status information;
[0034] Step S20: According to the real-time status information of the crane and the real-time information of the obstacle, it is judged whether the preset vehicle receiving condition is met;
[0035] Step S30: When it is judged that the preset car receiving condition is met, the car receiving action is controlled and executed according to the real-time status...
no. 2 example
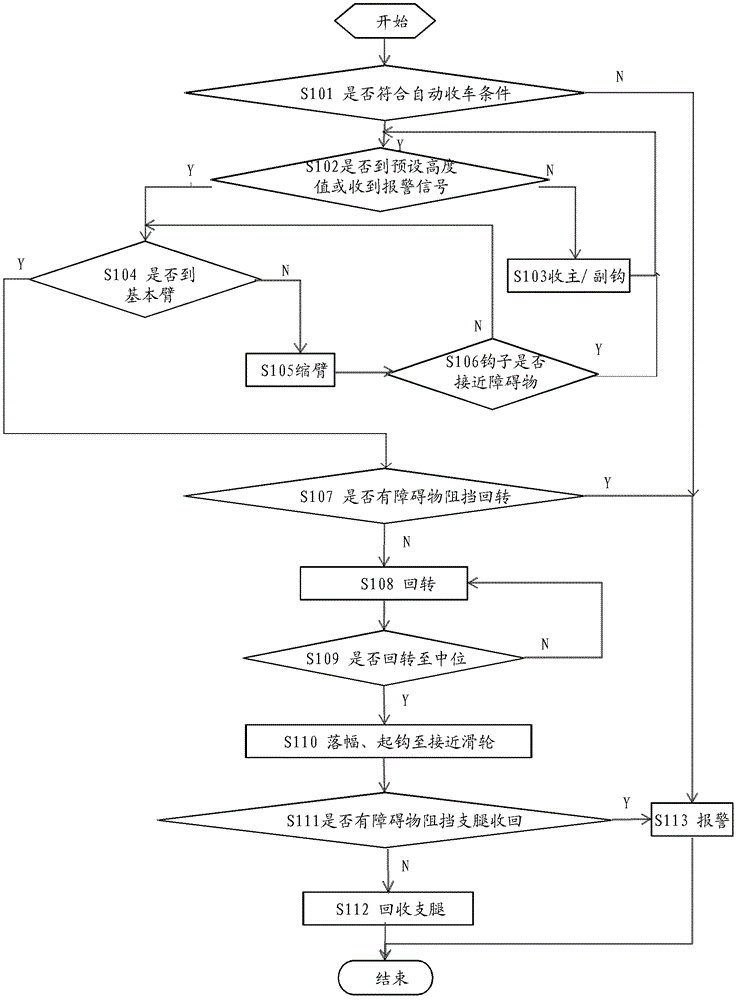
[0037] figure 2 The example shown is figure 1 Each step is based on the real-time status information of various cranes and the specific scheme of each specific receiving operation, such as figure 2 As shown, the second embodiment of the crane receiving system of the present invention includes:
[0038] Step S101, according to the real-time status information of the crane and the real-time information of the obstacle, it is judged whether the preset vehicle receiving condition is met;
[0039] In specific operations, the preset car receiving conditions may include:
[0040] 1) The distance between the main / auxiliary hook and the ground is greater than the preset distance, such as 2m;
[0041] The position of the main / auxiliary hook can be calculated based on the main / auxiliary hoist angle (speed information) and number of turns information collected by the main / auxiliary hoist encoder, the boom angle information sent by the existing length angle sensor, and the crane arm l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com