Full-automatic visual spot-welding robot
An automatic spot welding and fully automatic technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc. problems, to achieve the effect of reducing product defects, excellent sports performance, and reducing errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
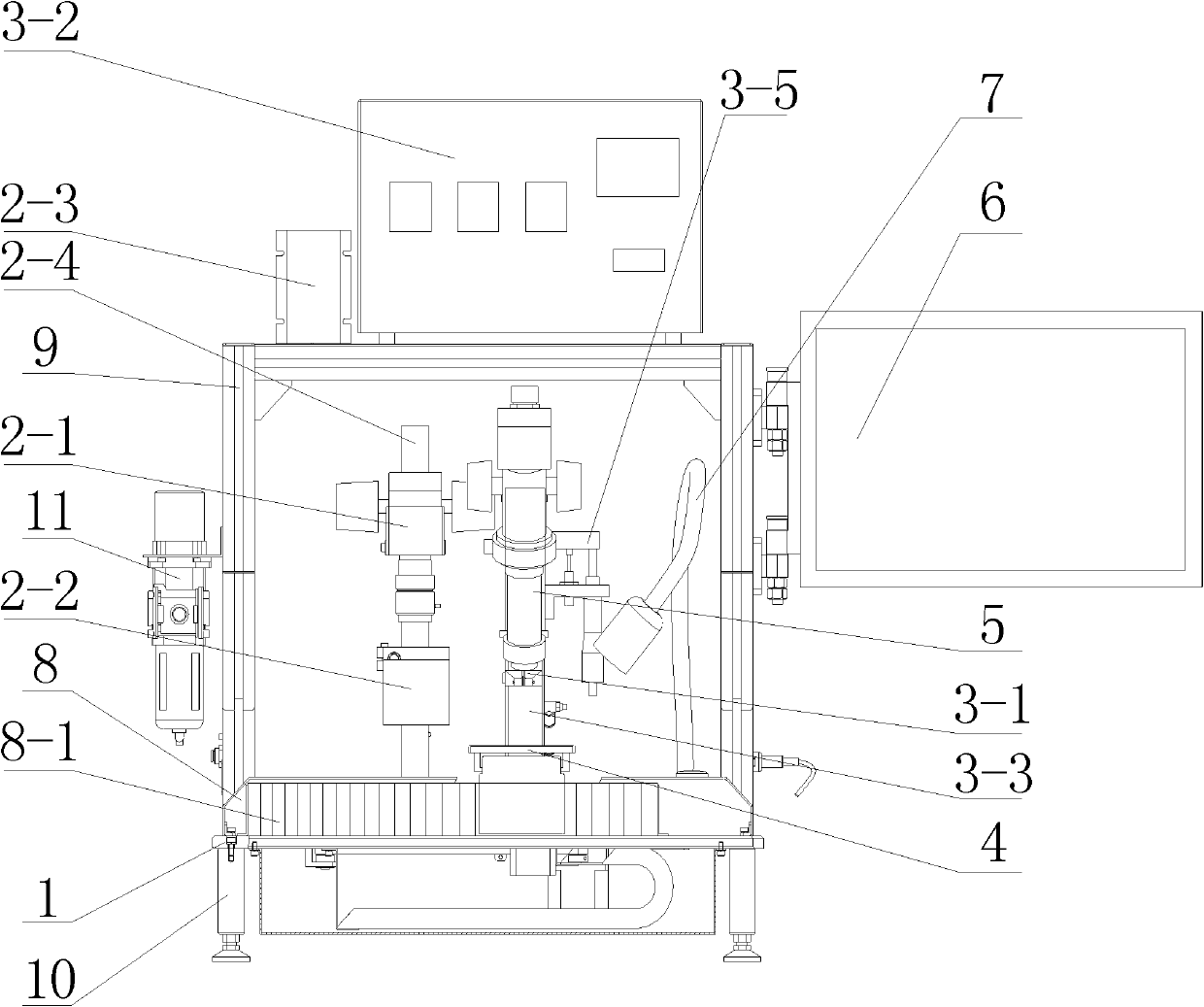
[0020] Such as Figure 1-Figure 3 A kind of fully automatic visual spot welding robot shown, comprises base plate mechanism 1, visual identification system, automatic spot welding system, two-dimensional motion platform system and is used for setting the industrial computer of visual parameter and data processing, described visual identification system, The automatic spot welding system, the motion platform system and the industrial computer are all arranged on the bottom plate mechanism 1 .
[0021] The visual recognition system includes an industrial camera 2-1, a light source 2-2 and a light source controller 2-3 for switching the light source 2-2 and adjusting the light intensity of the light source 2-2. The industrial camera 2-1 and the light source 2 -2 is connected to the bottom plate mechanism 1 through a lifting platform, the lifting platform is composed of a column 2-4 and two sliders arranged on the column 2-4, and the column 2-4 is fixedly connected to the bottom p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com