Electromagnetically-driven spherical robot
A spherical robot, electromagnetic drive technology, applied in the field of electromechanical, to achieve the effect of simplified drive mode, stable and flexible movement, strong controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
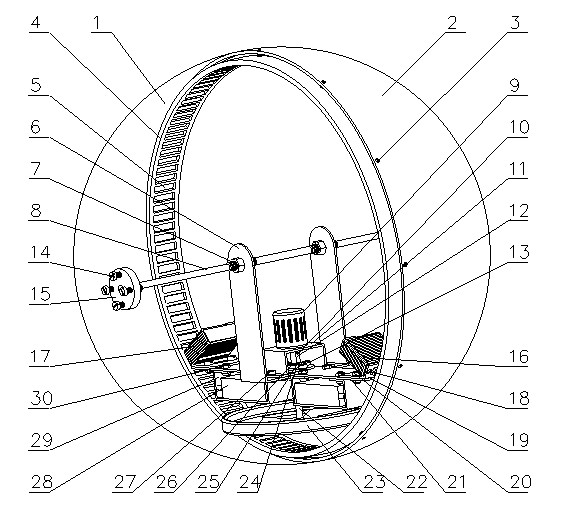
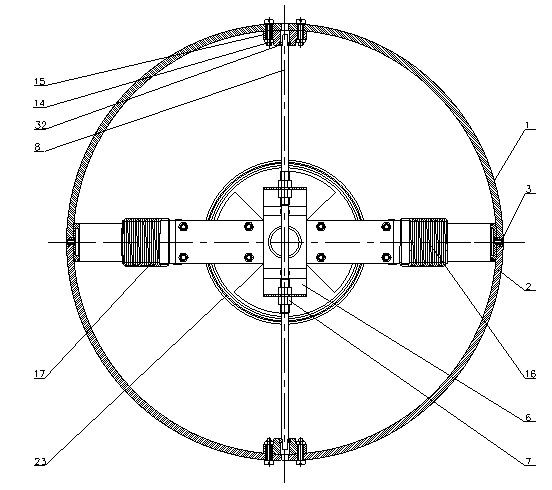
[0026] like figure 1 , 2 , 3, an embodiment of the present invention is: an electromagnetically driven spherical robot, comprising a spherical shell, a magnetic steel ring, and an internal drive structure; the spherical shell is composed of a left hemispherical shell 1 and a right hemispherical shell 2, and The inner wall is equipped with a magnetic steel ring 4, the magnetic steel ring is fixedly connected with the inner wall of the spherical shell and concentric with the spherical shell, the left and right hemispherical shells and the magnetic steel ring are fastened by screws 3, and the permanent magnets 5 are evenly arranged on the magnetic steel ring. The N poles of two adjacent permanent magnet steels or electromagnets face opposite directions; the internal drive structure inside the spherical shell mainly includes: bracket 6, main shaft 8, motor 9, motor bracket 11, and electromagnetic coils arranged symmetrically with respect to main shaft 8 16. The second core elec...
Embodiment approach
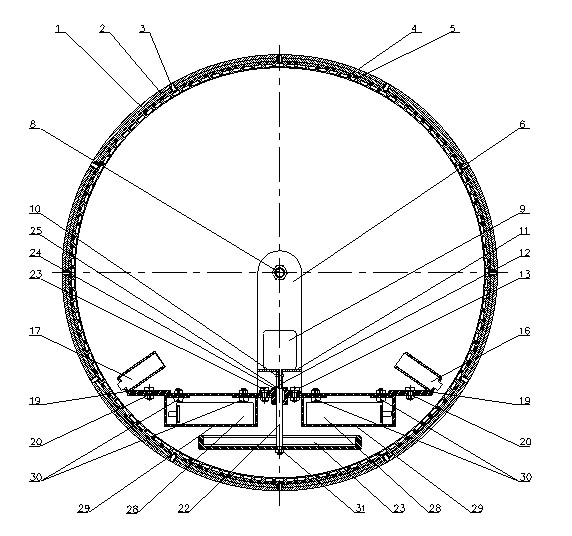
[0029] see Figure 5 Another embodiment of the present invention shown: an electromagnetically driven spherical robot device, comprising a spherical shell, a magnetic steel ring, and an internal drive structure; the spherical shell is composed of a left hemispherical shell 1 and a right hemispherical shell 2, and the The magnetic steel ring 4 is installed, and the magnetic steel ring is fixedly connected with the inner wall of the spherical shell and is concentric with the spherical shell. The left and right hemispherical shells and the magnetic steel ring are fastened by screws 3, and the permanent magnetic steel rings are evenly arranged on the magnetic steel ring. The N poles of two adjacent permanent magnets or electromagnets face opposite directions; the internal drive structure inside the spherical shell mainly includes: bracket 6, main shaft 8, motor 9, motor bracket 11, electromagnetic coil 16. Electromagnetic coil Ⅲ16-1, electromagnetic coil Ⅱ17, electromagnetic coil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com