Method for map matching with sensor detected objects
A sensor and object technology, used in geographic positioning systems, vehicle navigation, and digital maps, to solve problems such as high position accuracy and backwardness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
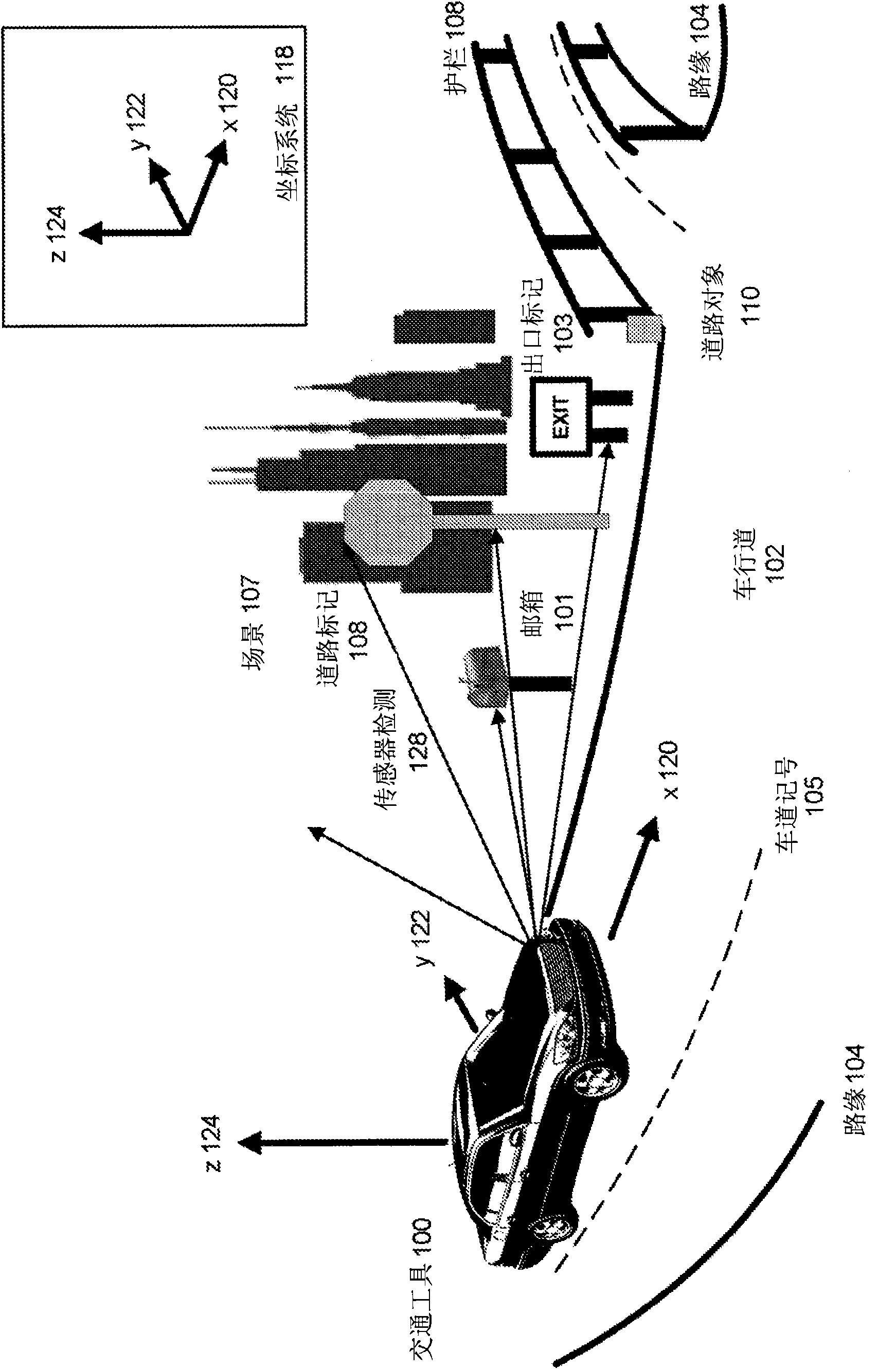
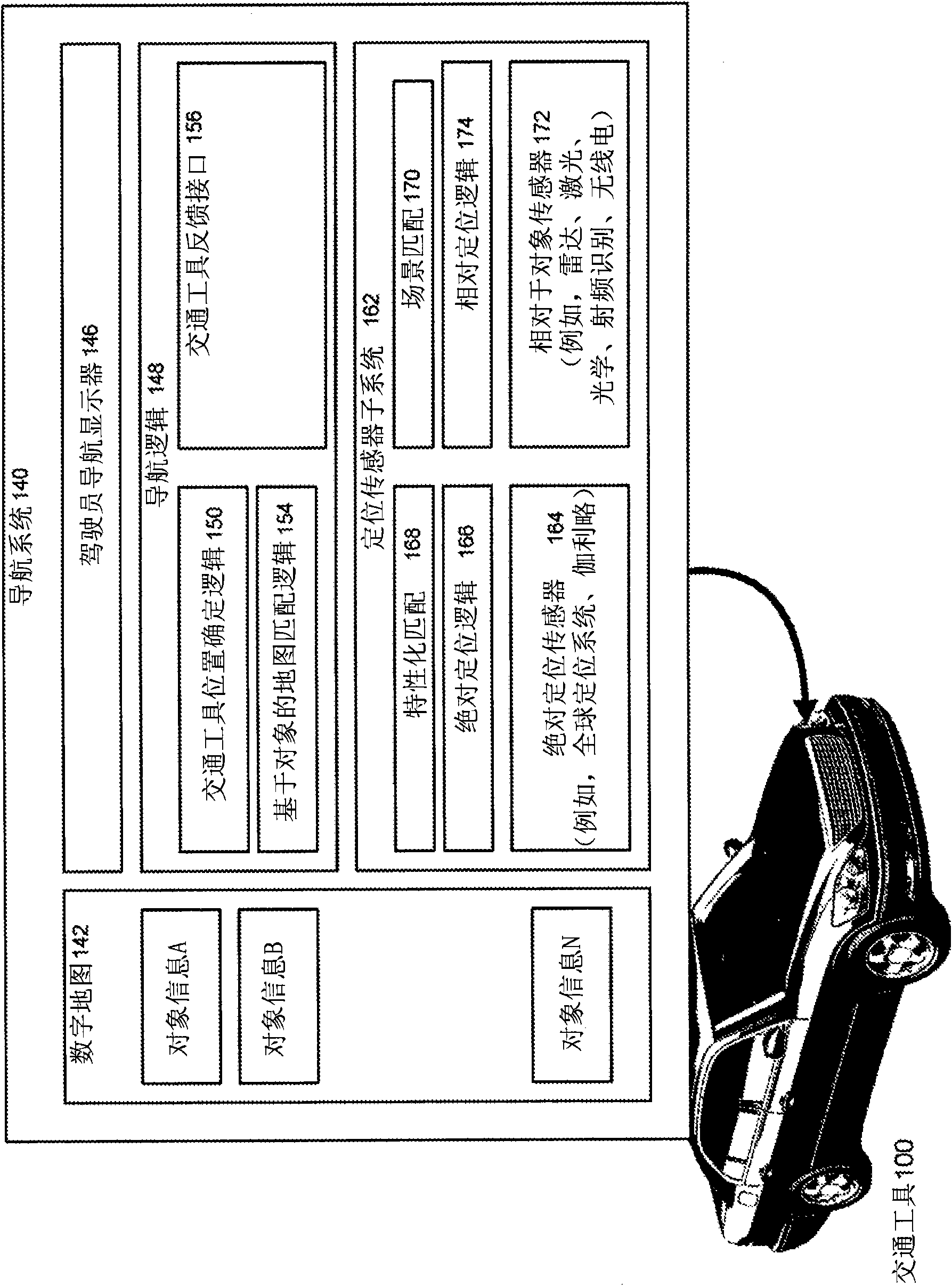
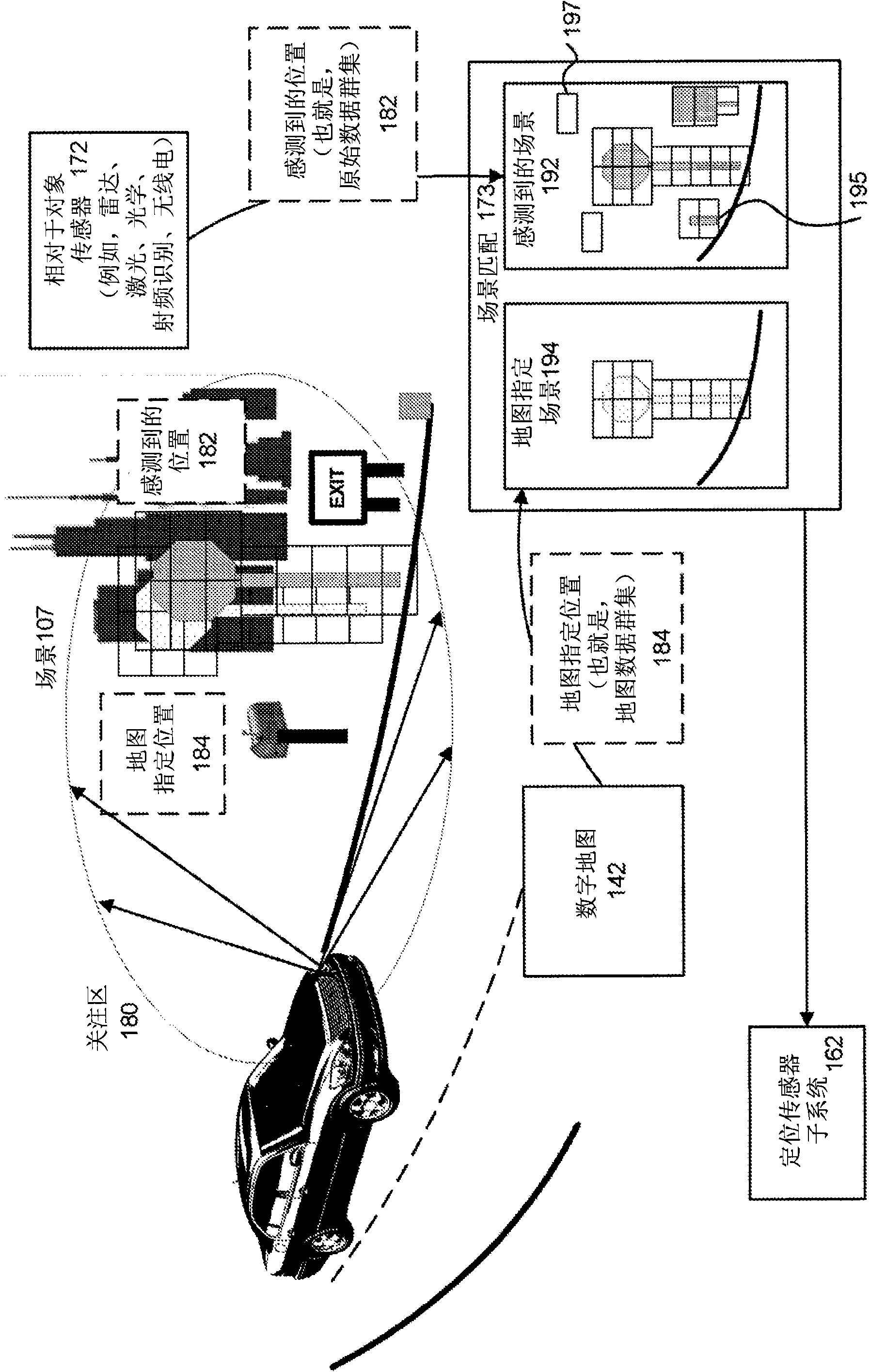
[0029]Described herein is a system and method for map matching with sensor-detected objects. Objects passed by the driver can be disambiguated using direct sensor and object matching techniques. The technique also makes it possible for a navigation system to refine (ie, improve the accuracy of) its position estimate.
[0030] For future navigation-related applications, anticipating a map match to the center of the road may not be sufficient, even when combined with GPS or inertial sensors. A typical roadway with two travel lanes in each direction and a parking lane along each side may be about 20 meters wide. A road centerline is an idealized simplification of a road, essentially having zero width. Inference-based map matching is generally not able to help locate in which particular lane of the road a vehicle is located, or even where a vehicle is located along the road to a high degree of accuracy (say, 5 meters). Today's consumer-level GPS technology may have different so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com