Unmanned boat automatic survey system and unmanned boat automatic survey method
A technology for automatic observation and unmanned boats, which is applied in radio wave measurement systems, satellite radio beacon positioning systems, traffic control systems, etc., and can solve problems such as the inability to automatically generate observation routes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] The unmanned boat automatic observation system and the unmanned boat automatic observation method described in Embodiment 1 generate a plurality of observation routes at certain intervals based on the input reference observation line. It is possible to automatically perform underwater and underwater observation by navigating through the plurality of observation routes. The interval of the observation route can be freely set, so for example, in the case of drawing detailed underwater drawings, by setting the interval of the observation route to be narrow, the unmanned boat can travel back and forth at a narrow interval, thereby enabling detailed Earth observation of the bottom of the water.
[0034] First, the configuration of the unmanned boat automatic observation system in Embodiment 1 will be described.
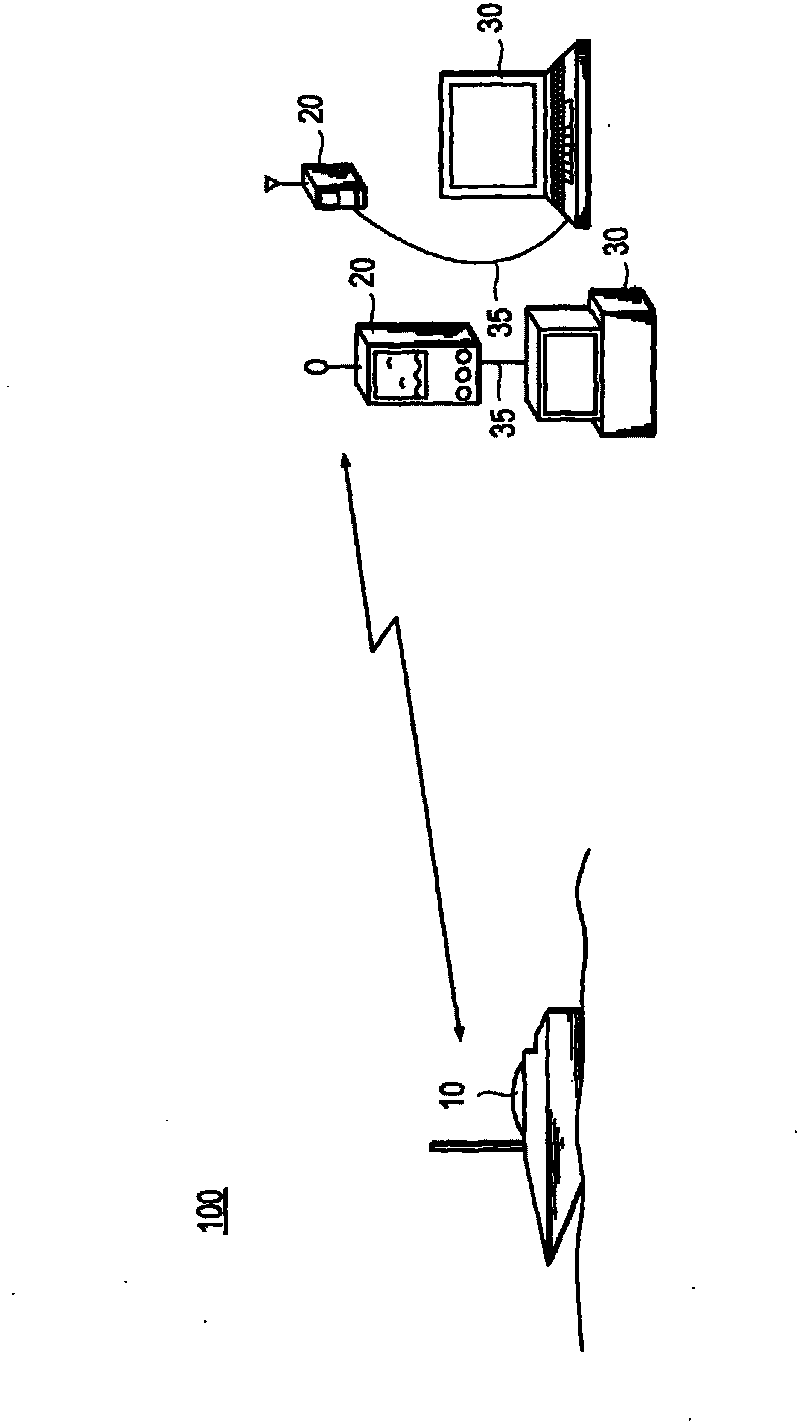
[0035] figure 1 It is a structural diagram of the unmanned boat automatic observation system related to the present invention.
[0036] As shown in the figure, t...
Embodiment 2
[0098] In the unmanned boat automatic observation system and the unmanned boat automatic observation method described in Embodiment 2, in the vertical direction of the measurement line forming the input reference observation line, a straight line extending at a certain interval is generated, thereby generating a plurality of observation routes , by automatically navigating the unmanned boat 10 on the plurality of observation routes, underwater and underwater observations are automatically performed. The interval of the observation route can be freely set, so for example, when a detailed underwater map is desired, by setting the interval of the observation route to be narrow, the unmanned boat 10 can travel back and forth at a narrow interval, and can observe Detailed underwater conditions.
Embodiment 11
[0099] The eleventh embodiment differs from the second embodiment only in that the observation route generation unit 26 included in the wireless controller system 20 is used to create the observation route. Therefore, the configuration of other parts except the observation route generation unit 26 is completely the same as that of the unmanned boat automatic observation system described in Embodiment 1, and thus the description of these configurations and operations will be omitted.
[0100] Figure 11 It is a figure which shows an example of the reference observation line created by the reference observation line creation part 25, Figure 12 is a diagram showing an example of the survey route generated by the survey route generator 26 .
[0101] Figure 5 The reference observation line creation unit 25 included in the wireless controller system 20, such as Figure 11 As shown, a measurement line or arc is created with the two coordinates input through the operation switch ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com