Motion planning method and apparatus for preventing humanoid robot tilting forwards and backwards
A humanoid robot and robot motion technology, applied in transportation and packaging, motor vehicles, automatic toys, etc., can solve the problems of easy falling, affecting the stability of the ground, affecting the operation accuracy of the upper arm of the humanoid robot, and improving the stability of the robot. stability, reducing the effect of fore and aft tilt
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
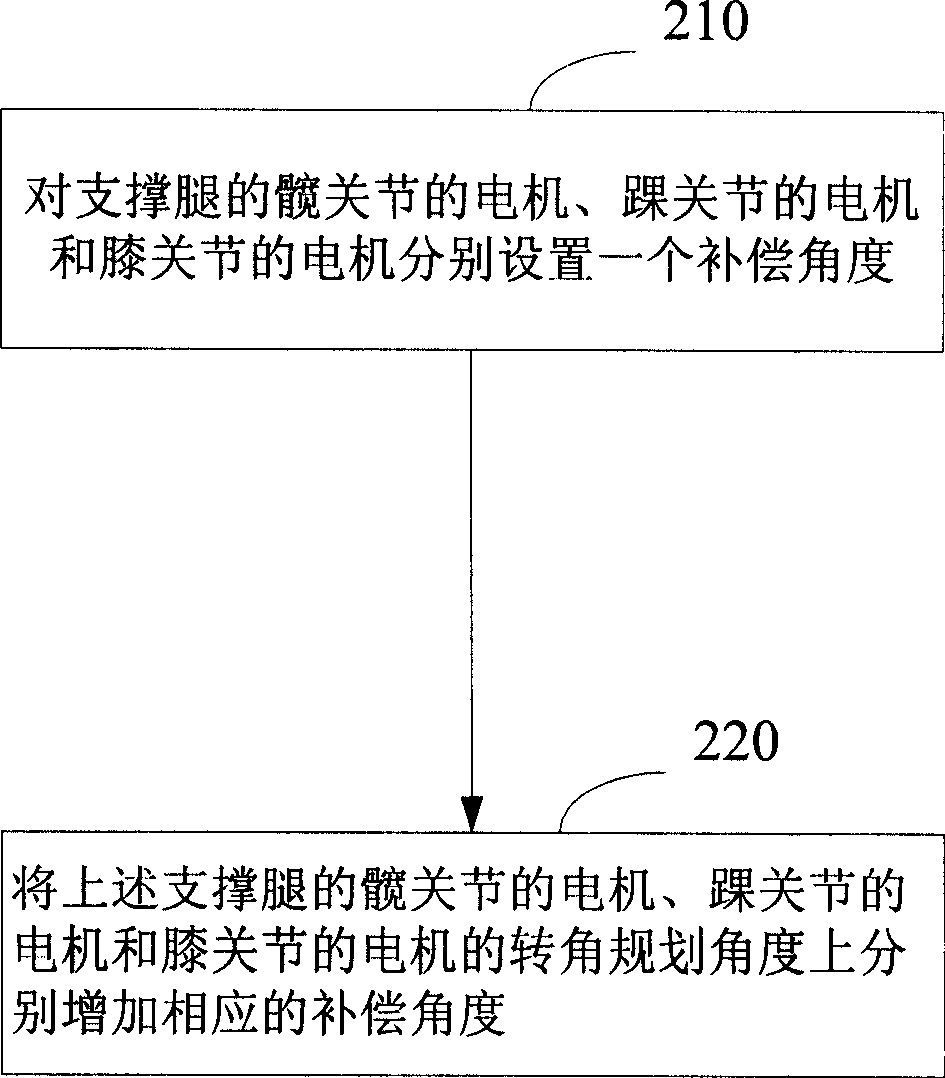
[0032] Embodiments of the present invention provide a motion planning method for preventing a humanoid robot from tilting forward and backward based on the idea of forward-backward tilt compensation, see figure 2 , including the following steps:
[0033] 210: Set a compensation angle for the motor of the hip joint, the motor of the ankle joint and the motor of the knee joint of the supporting leg respectively.
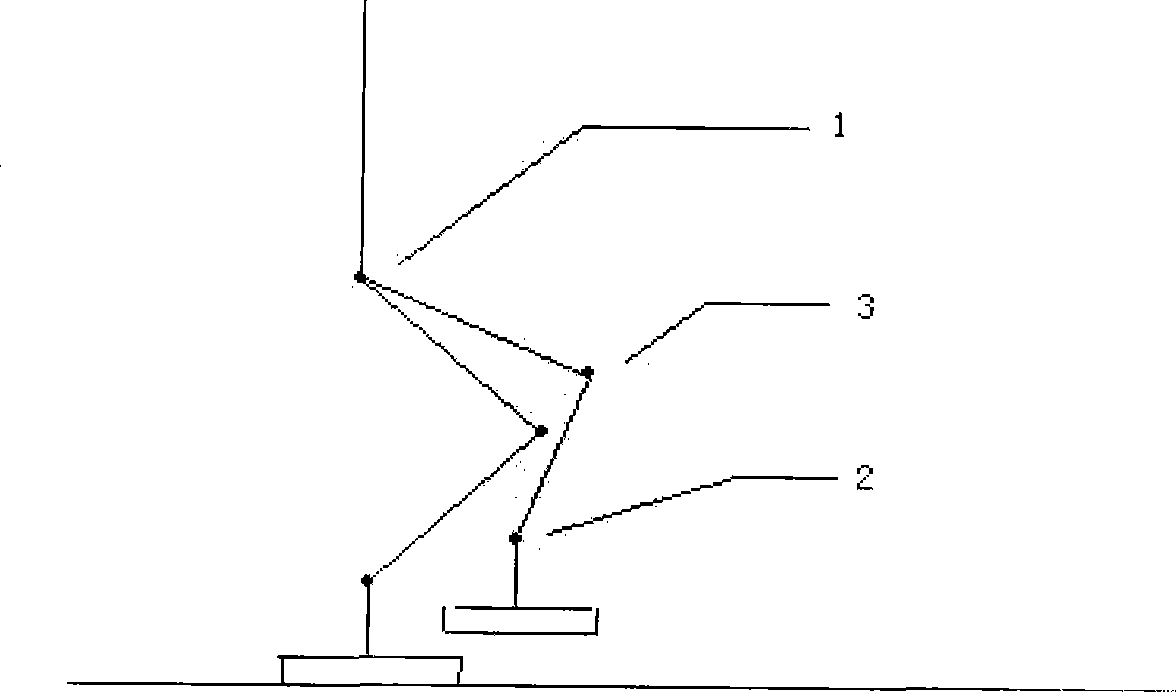
[0034] Simplify the human motion model to obtain the commonly used seven-link model of humanoid robots, such as image 3 shown. 1 is the midpoint of the line connecting two hip joints at the waist of the humanoid robot, 2 is the left ankle joint of the humanoid robot, and 3 is the left knee joint of the humanoid robot. image 3 The lower limbs of the humanoid robot in the model have 12 degrees of freedom (one motor represents one degree of freedom), and each leg has 6 degrees of freedom, including 3 hip joints, 1 knee joint and 2 ankle joints. The above-mentioned...
Embodiment 2
[0047] Embodiments of the present invention provide a motion planning device for preventing a humanoid robot from tilting forward and backward based on the idea of forward-backward tilt compensation, see Figure 6 ,include:
[0048] The compensation angle module 601 is configured to set a compensation angle for the motor of the hip joint, the motor rotation angle of the ankle joint and the motor rotation angle of the knee joint of the supporting leg.
[0049] The above-mentioned motors of the hip joint, the motor of the ankle joint and the motor of the knee joint are all motors whose axial direction is along the left and right directions of the humanoid robot.
[0050] Such as Figure 4 As shown, take the right side of the humanoid robot as the positive direction of the X-axis, take the front of the humanoid robot as the positive direction of the Y-axis, and take the top of the humanoid robot as the positive direction of the Z-axis to establish a world coordinate system. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com