Automatic parking path tracking method based on transverse and longitudinal decoupling
A path tracking and automatic parking technology, applied in the field of automatic driving and automatic parking, can solve the problem of inaccurate control results, and achieve the effect of improving parking accuracy, reducing horizontal and vertical errors, and smoothing rotation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
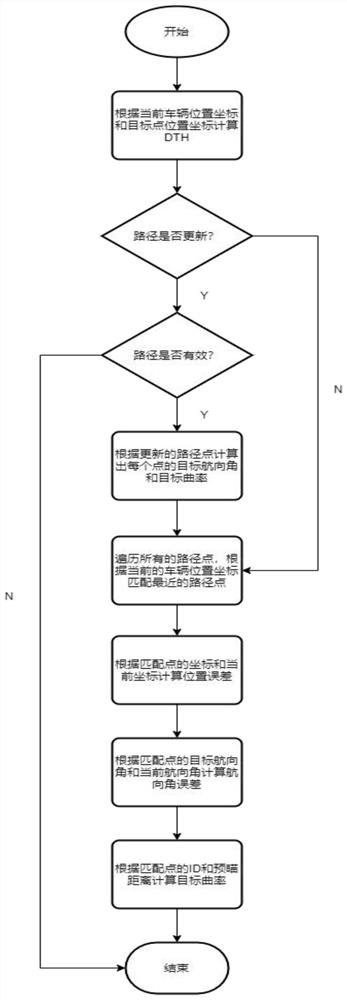
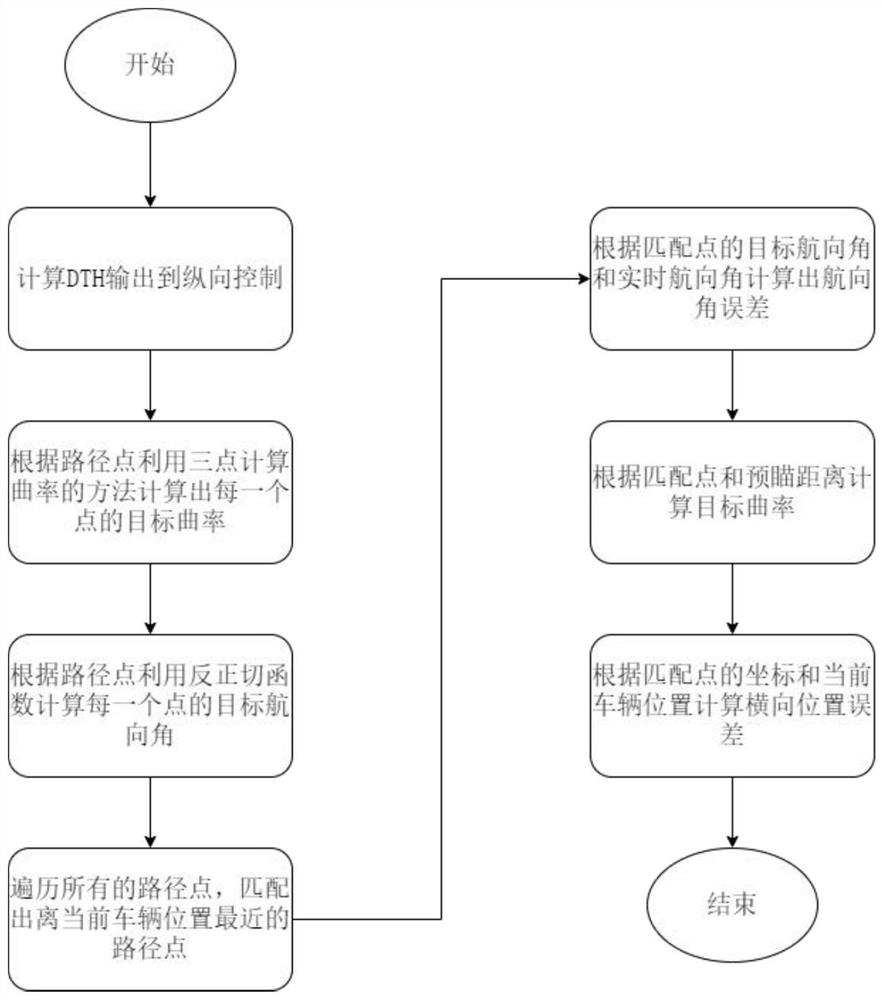
[0043] like figure 1 , figure 2As shown, the automatic parking path tracking method based on horizontal and vertical decoupling provided by this embodiment includes calculating the distance DTH from the real-time position of the vehicle to the target point according to the real-time position coordinates of the vehicle and the position coordinates of the target point, and converting the calculated distance to the target point. Output to the vehicle longitudinal control module; use the target trajectory and real-time vehicle heading angle to calculate the heading angle error EYaw, use the target trajectory and real-time vehicle position coordinates to calculate the lateral position error EPos, use the target trajectory to calculate the target curvature Curvature, and use the calculated heading. The angular error, lateral position error, and target curvature results are output to the vehicle lateral control module.
[0044] Further, before calculating the heading angle error, l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com