


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Intelligent inspection robot for bridge structure diseases
A bridge structure and intelligent inspection technology, applied in bridges, bridge construction, bridge parts, etc., can solve problems such as single operation function, and achieve the effect of improving the efficiency of inspection and diagnosis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
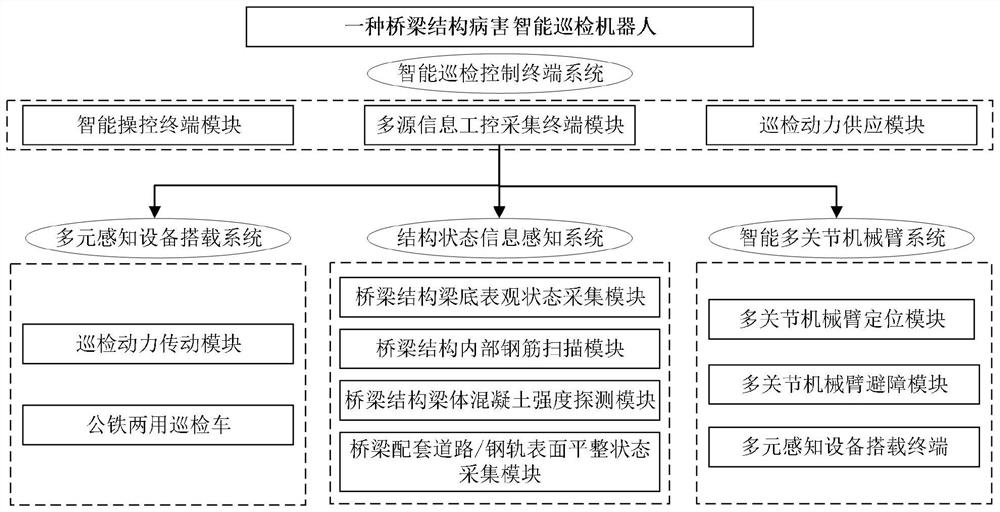
[0027] Embodiment 1: This embodiment describes an intelligent inspection robot for bridge structural diseases. The robot includes an intelligent inspection control terminal system, a structural state information perception system, a multi-sensing equipment carrying system, and an intelligent multi-joint robotic arm system. ;
[0028] The intelligent inspection control terminal system, the structural state information sensing system, the multi-sensing equipment carrying system and the intelligent multi-joint robotic arm system can be connected through a mechanical connection relationship between the four systems;
[0029] The intelligent inspection control terminal system includes an intelligent control terminal module, an inspection power supply module and a multi-source information industrial control collection terminal module, and the three modules have a mechanical connection relationship;
[0030] The intelligent control terminal module includes the main power brake of the...
specific Embodiment approach 2
[0040] Embodiment 2: The intelligent inspection robot for bridge structural diseases described in Embodiment 1, the operation of the intelligent inspection robot follows the following steps:
[0041] Step 1: For the highway / railway bridge structure that needs to be inspected for healthy service status, adjust the distance between the intelligent multi-joint robotic arm system and the bridge structure beam through the intelligent multi-joint robotic arm control terminal under the multi-source information industrial control acquisition terminal module. The relative position makes the intelligent multi-joint robotic arm system enter the pre-operation state;
[0042] Step 2: Based on the pre-operation state of the intelligent multi-joint robotic arm system in Step 1, the inspection robot is manipulated through the intelligent control terminal module to operate along the road / railway bridge structure;
[0043] Step 3: For the road-rail dual-purpose inspection vehicle in the operati...
specific Embodiment approach 3
[0046] Embodiment 3: In the intelligent inspection robot for bridge structural diseases described in Embodiment 2, the step 1 is specifically:
[0047] (1) For highway / railway bridge structures that need to be inspected for healthy service status, use the intelligent multi-joint manipulator control terminal under the multi-source information industrial control acquisition terminal module mentioned in step 1 to trigger the multi-joint manipulator to adjust the scale factor :
[0048]
[0049] In the formula, is the adjustment scale factor for the multi-joint manipulator; θ is the angle value of the manipulator adjustment;
[0050] (2) The intelligent multi-joint manipulator system mentioned in step 1 has two sub-multi-joint manipulator systems, namely the bridge structure beam top intelligent multi-joint manipulator subsystem and the bridge structure beam bottom intelligent multi-joint manipulator subsystem. The multi-joint robotic arm system includes a multi-joint roboti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com