Laser radar and navigation radar target fusion method
A technology of laser radar and navigation radar, applied in the field of data processing, can solve the problems of rapid changes in traffic situation and small range of safety contours
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0020] figure 1 It is a schematic structural diagram of the laser radar and navigation radar target fusion method in the embodiment of the present invention.
[0021] See figure 1 , the lidar and navigation radar target fusion method of the embodiment of the present invention, comprises the following steps:
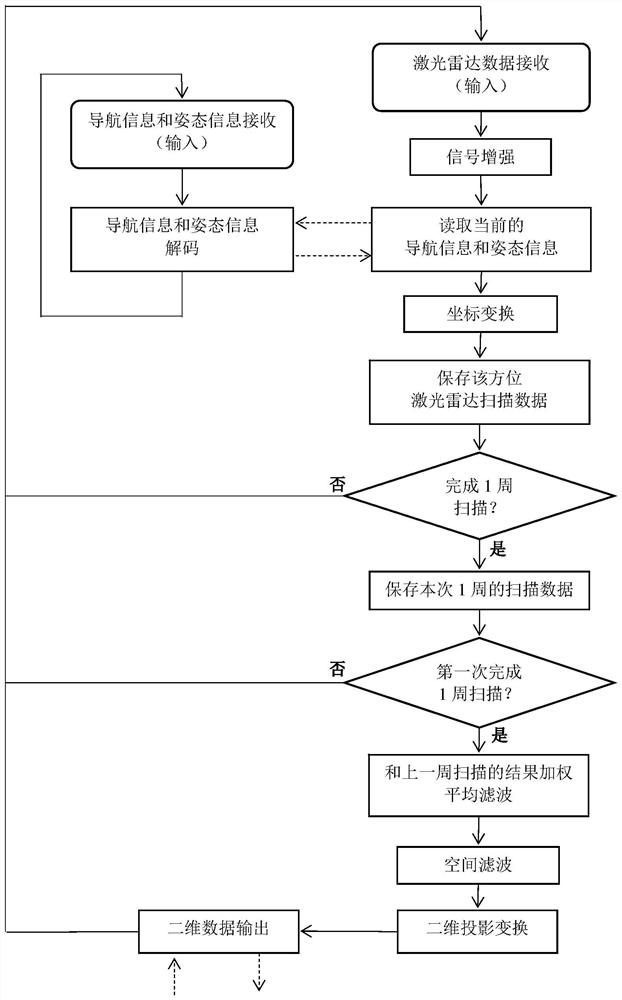
[0022] S1: Transform the 3D point cloud data of the lidar into 2D image data;
[0023] S2: According to the two-dimensional image data of the lidar, the lidar target is extracted, tracked and track distributed through the radar tracker;
[0024] S3: The track fusion engine obtains the laser radar target track output by the radar tracker, combines the track fusion with the navigation radar target track, and generates the fusion target and the track information of the fusion target.
[0025] See figure 2 , the lidar and navigation radar target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com