Dynamic target traversal access sequence planning method and system
A technology for accessing sequences and dynamic targets, applied in genetic rules, instruments, calculation models, etc., can solve problems such as poor optimization results and low optimization efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
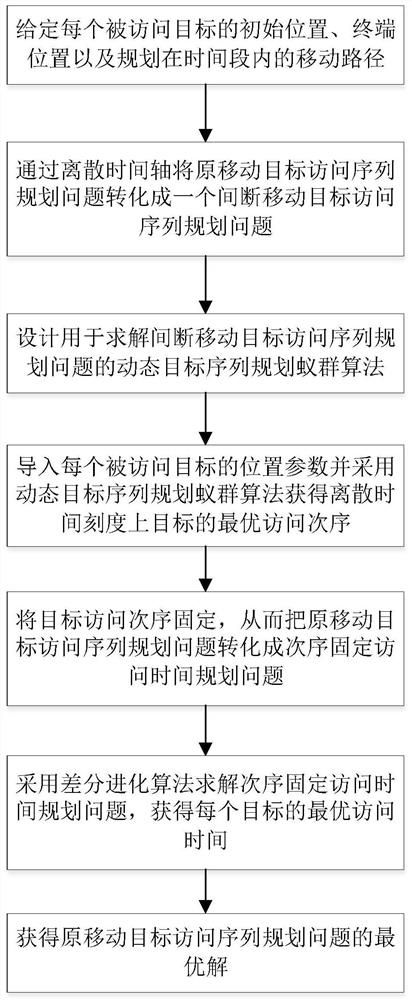
[0087] like image 3 As shown, the dynamic target traversal access sequence planning method provided in this embodiment includes the following steps:
[0088] S1: Given the initial position of each target in the access sequence planning problem of moving targets, the terminal position and the moving path of each target within the planning time period ΔT.
[0089] S2: Transform the moving target access sequence planning problem into an intermittent moving target access sequence planning problem through the discrete time axis, and construct the intermittent moving target access sequence planning problem model.
[0090] The original moving target access sequence planning problem can be described as the following form:
[0091] The design variables of the moving target access sequence planning problem are:
[0092] x 1 =[S 1 ,S 2 ,...,S N , T 1 , T 2 ,...,T N ,Δt 1 ,Δt 2 ,...,Δt N ] (1)
[0093] Among them, N is the number of targets; S i is the access order of the i-t...
Embodiment 2
[0153] Using the dynamic target traversal access sequence planning method provided in Embodiment 1, this embodiment takes a planar mobile city parade sequence planning problem as an example for illustration.
[0154] S1: Given the initial position of each visited target, the terminal position and the moving path of each target within the ΔT time period.
[0155] The time period ΔT of this calculation example is taken as 0 to 60 minutes, and the number of moving cities is 15, among which city 1 is fixed as the initial departure city. The location coordinates of the 15 mobile cities at the initial 0min and terminal 60min are shown in Table 1. Each city moves in a straight line from its initial position to its terminal position with a constant velocity. Moving trajectory such as Image 6 shown. The position of the triangle is the initial position of each city, and the position of the circle is the terminal position. The ranger also moves in a straight line from the current ci...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com