Indoor unmanned aerial vehicle, indoor unmanned aerial vehicle system and control method
A technology of unmanned aerial vehicle and multi-rotor unmanned aerial vehicle, which is applied in indoor unmanned aerial vehicle system and control, and in the field of indoor unmanned aerial vehicles. Improved accuracy, reduced part effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
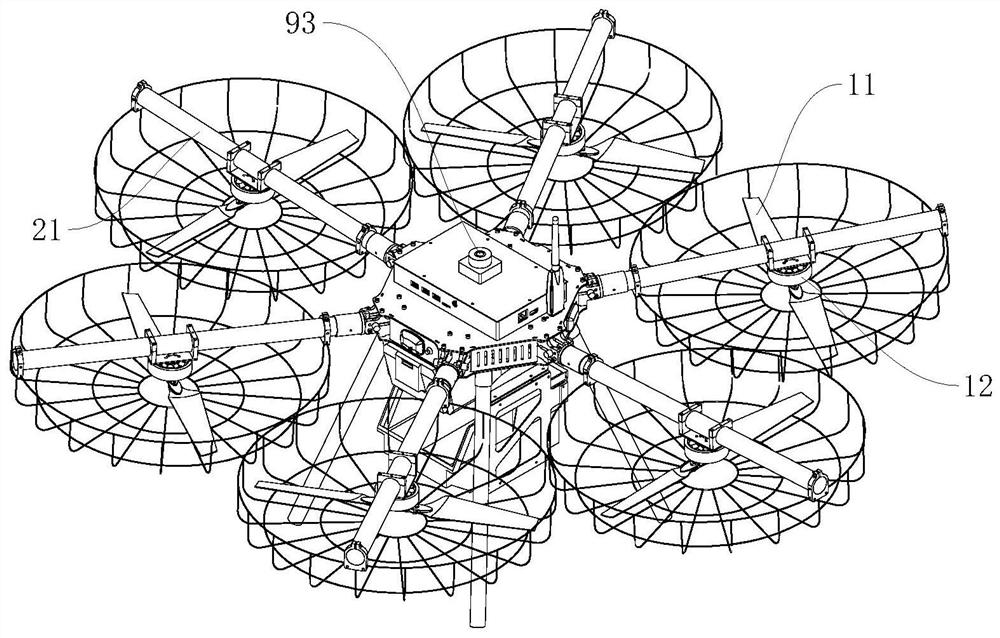
[0088] Such as Figure 1 to Figure 26 As shown, the indoor UAV includes a multi-rotor UAV body, and also includes a flight detection device, which is used to detect flight parameters; a path detection device, which is used to detect flight path parameters; a control device, a control device They are respectively electrically connected with the motor 12 of the multi-rotor UAV, the flight detection device and the path detection device, and are used to control the UAV according to the detected flight parameters and flight path parameters.
[0089] The flight detection device is used to control the flight of the UAV, detect the flight attitude, sense the environment, and avoid obstacles and people.
[0090] The path detection device is used to make the UAV fly along the set path without GPS signal, realize autonomous positioning and navigation, and thus automatically complete the flight task.
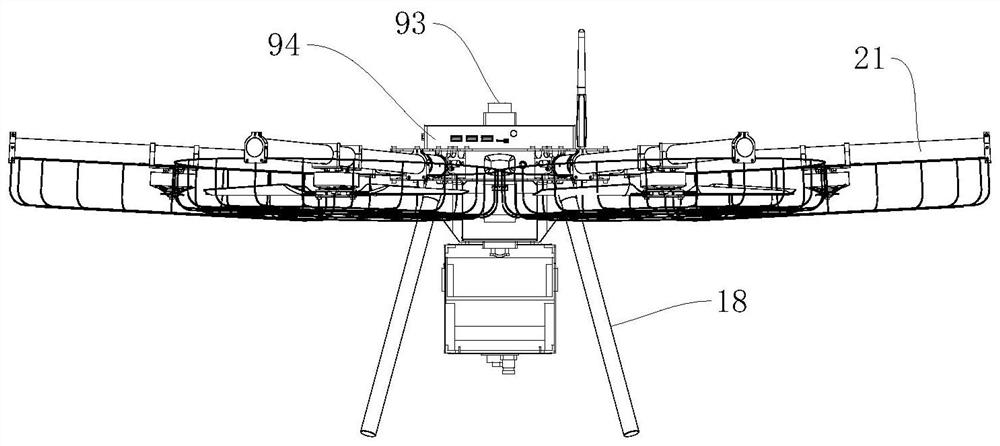
[0091] In one embodiment, the control device includes a path control device 94, the pa...
Embodiment 2
[0098] On the basis of the first embodiment above, an upper lidar sensor is also included, the upper lidar sensor is installed on the top of the multi-rotor UAV body, and the upper lidar sensor is used to detect the distance from the ground and avoid obstacles.
[0099] Using dual laser radar sensors to detect distance and avoid obstacles can greatly improve safety. The flying height of drones indoors is about 2.5 meters. There are raised forklifts in the indoor warehouse, and the height of raised forklifts is about 1.8 meters. Therefore, the use of two lidar sensors can improve the accuracy of detection, prevent collisions and accidents, and ensure safety.
Embodiment 3
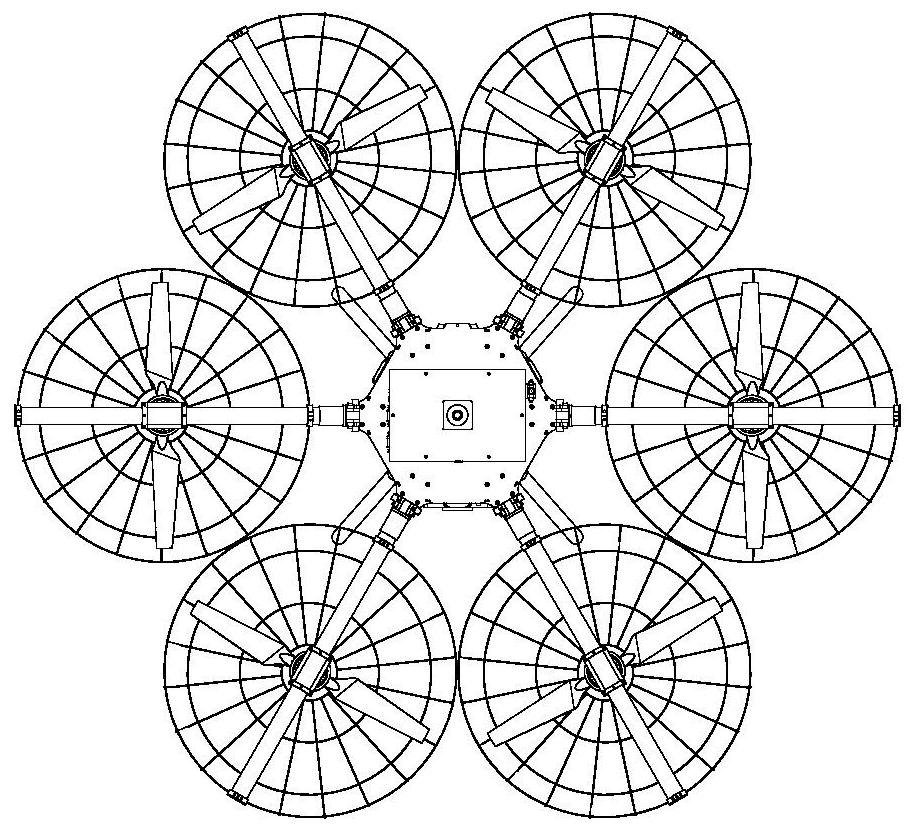
[0101] On the basis of any of the above-mentioned embodiments, such as Figure 1 to Figure 8 Shown, also comprise blade protection device, blade protection device comprises protection machine arm 21, and one end of protection arm 21 is fixed on the multi-rotor UAV body; The two ends of arm 21; protective net cover 25, protective net cover 25 is fixed on the net cover connector 25, and is positioned at the below of protective machine arm 21, and blade 11 is positioned at protective net cover 25 and rotates.
[0102] The net cover connector 25 is convenient for fixing the net cover, and makes the disassembly and assembly of the net cover easy and convenient for maintenance.
[0103] The driving motor 42 of the existing multi-rotor UAV is usually installed at the end of the machine arm, so other mechanisms are needed to extend the machine arm to install the net cover, resulting in poor stability and impact resistance, and the net cover connector 25 is fixed At the two ends of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com