Vehicle autonomous navigation method based on image matching/inertial navigation/odometer
An autonomous navigation and odometer technology, applied in the field of positioning and navigation, which can solve the problems of low accuracy and limited application scenarios.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
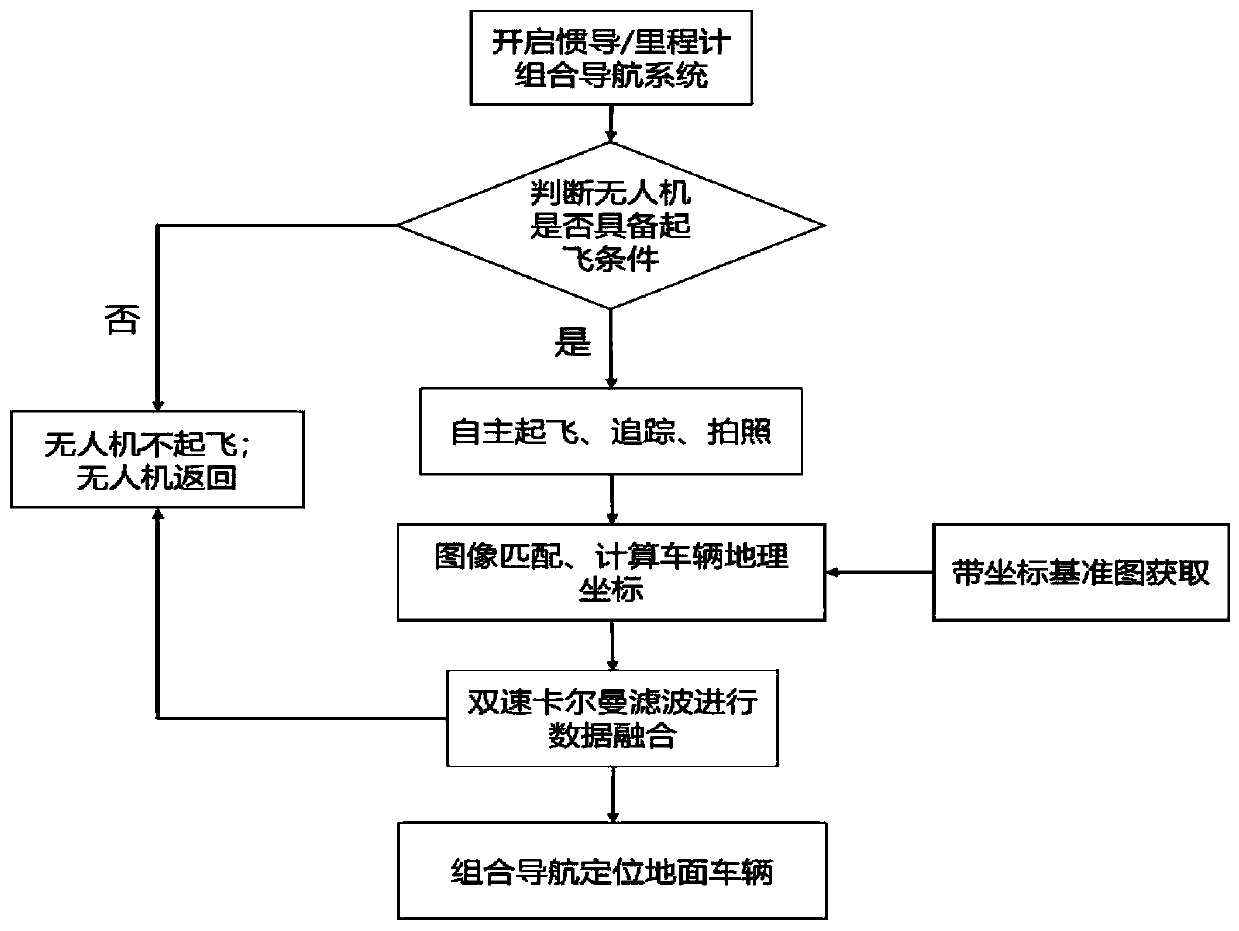
[0073] see Figure 1 ~ Figure 4 , a vehicle autonomous navigation method based on image matching / inertial navigation / odometer, comprising the following steps:
[0074] Step 1: Configure an unmanned aerial vehicle equipped with a ground camera on the ground vehicle that needs to be positioned;
[0075] Step 2: Start the vehicle-mounted inertial navigation / odometer integrated navigation system, and the driver will judge whether the UAV has the conditions for take-off when the vehicle is in motion;
[0076] Step 3: If the take-off conditions are met, the UAV (unmanned aerial vehicle) will take off autonomously and track the vehicle autonomously. At the same time, it will take pictures of the ground and use the captured real-time image to match the reference map made in advance to realize the positioning of the ground vehicle;
[0077] Step 4: After obtaining the positioning result, send it to the vehicle navigation computer for data fusion;
[0078] Step 5: After obtaining the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com