A road surface recognition and adaptive steering wheel torque compensation method based on rack force
A road surface recognition and steering wheel technology, which is applied to power steering mechanisms, automatic steering control components, steering mechanisms, etc., can solve problems such as torque reduction, driver's hand strength is too light, feedback feel and poor road feel, etc., to avoid traffic accidents risk effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
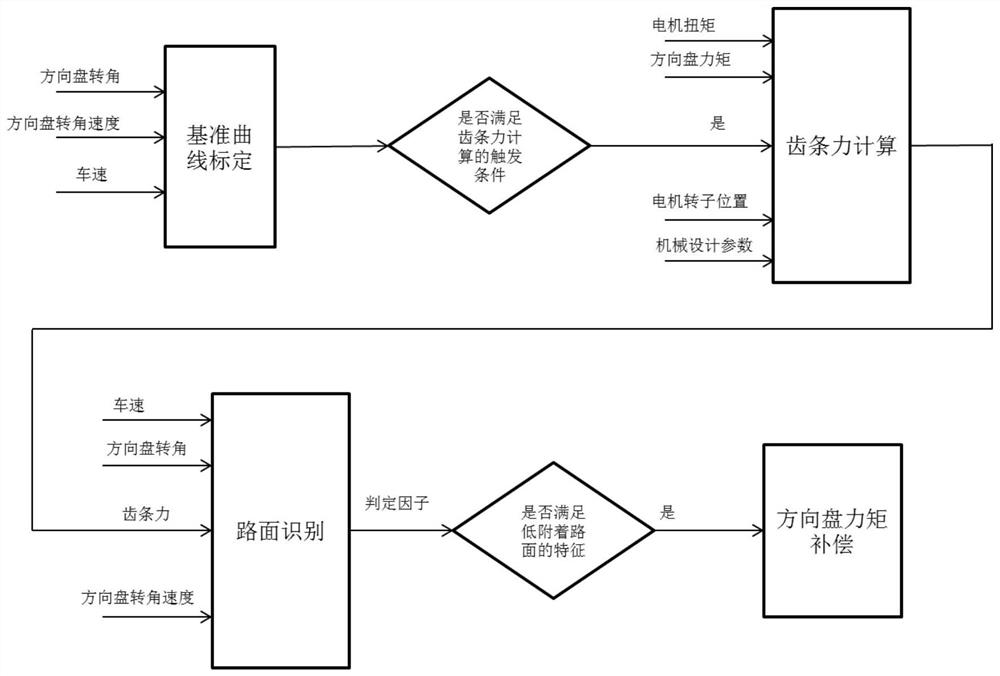
[0112] Such as Figure 1 to Figure 7 As shown, a rack force-based road surface recognition and adaptive steering wheel torque compensation method includes the following steps:
[0113] 1) Calibration of the reference curve:
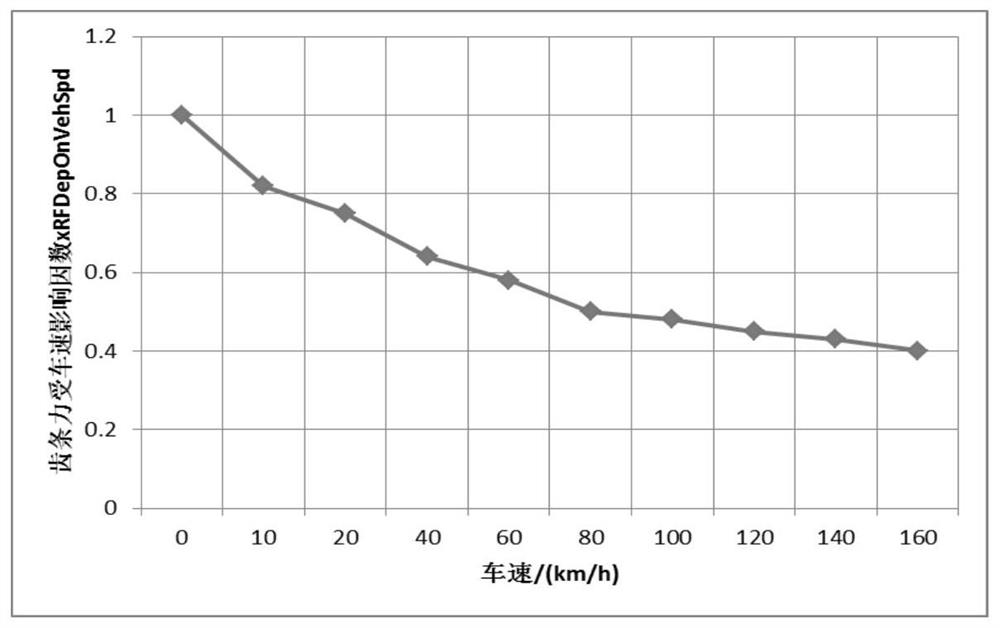
[0114] Calibrate the reference curve according to the steering wheel angle, steering wheel angular speed and vehicle speed input signal, which is divided into three parts: the calibration reference rack force curve, the calibration rack force variation factor with vehicle speed and the calibration rack force variation factor with steering wheel speed. , which is specifically:
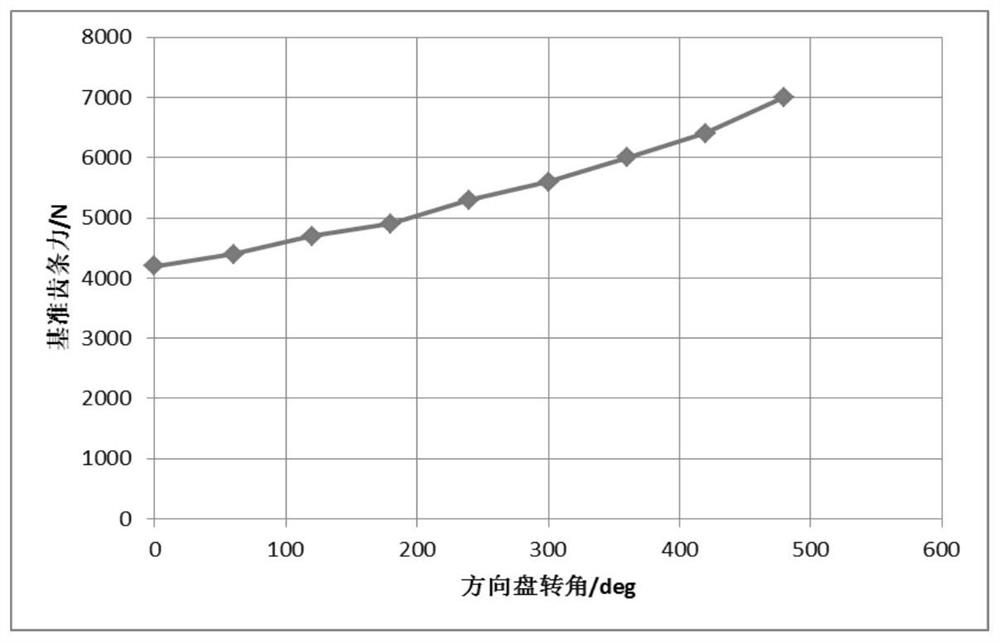
[0115] 1a) if figure 2 As shown in , the reference rack force curve is calibrated, wherein the reference value of the rack force changes with the change of the steering wheel angle, and the steps are as follows:
[0116] 1a1) Correct the tire pressure to the specified value, which can be directly obtained from the OEM;
[0117] 1a2) Load the vehicle to full load. The load at f...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap