Tail end traction-type finger rehabilitation robot
A rehabilitation robot and terminal traction technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of difficult hand force signal acquisition and feedback, low safety, complex structure, etc., to avoid secondary injuries , High safety, guaranteed safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
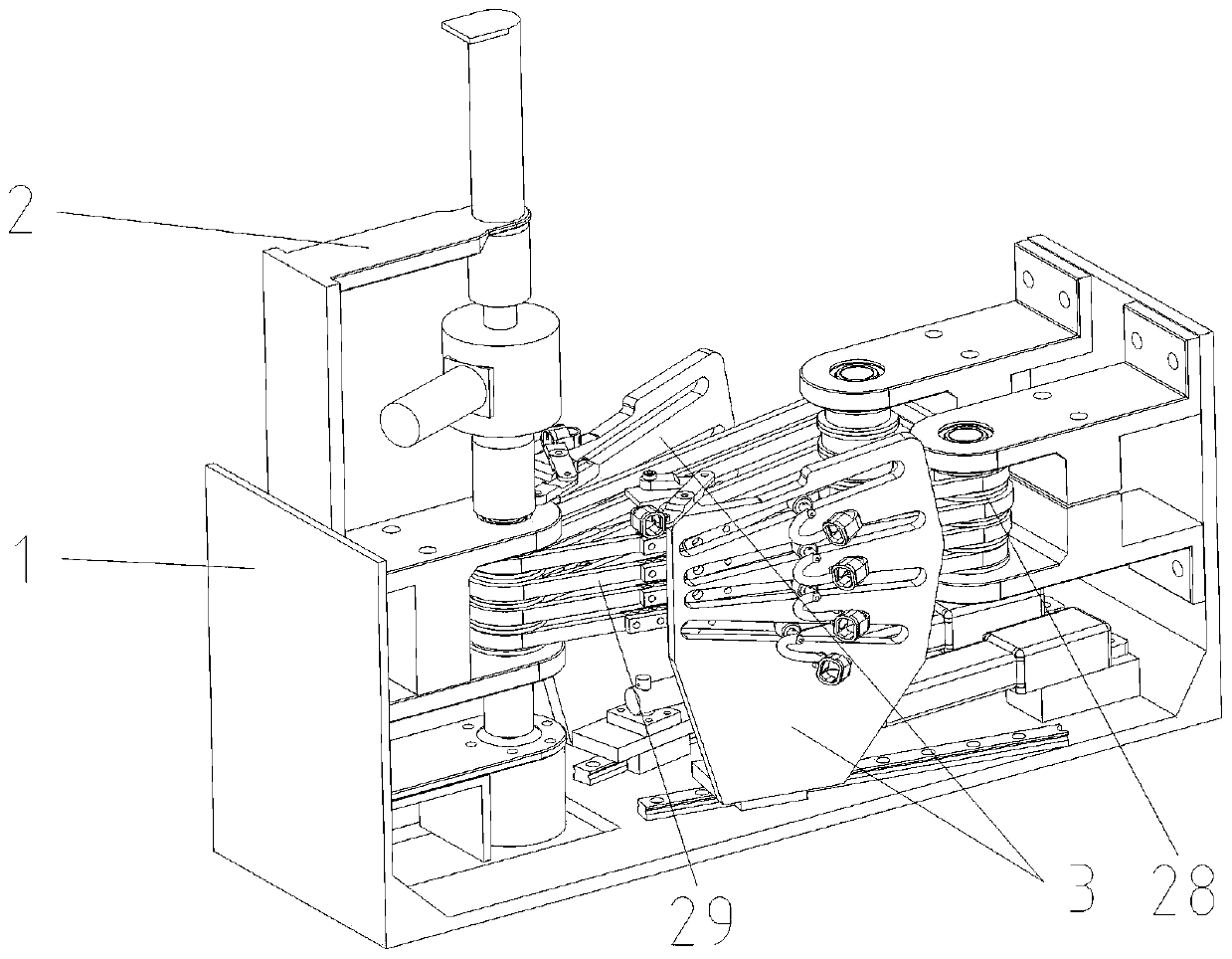
[0037] Such as Figure 1-Figure 10 The shown specific embodiment of an end-drawing finger rehabilitation robot of the present invention includes: a fixed base 1, a power drive assembly 2 installed at one end of the fixed base 1, and two opposite fingers that are slidably connected to the fixed base 1 Flexion and extension mechanism 3.
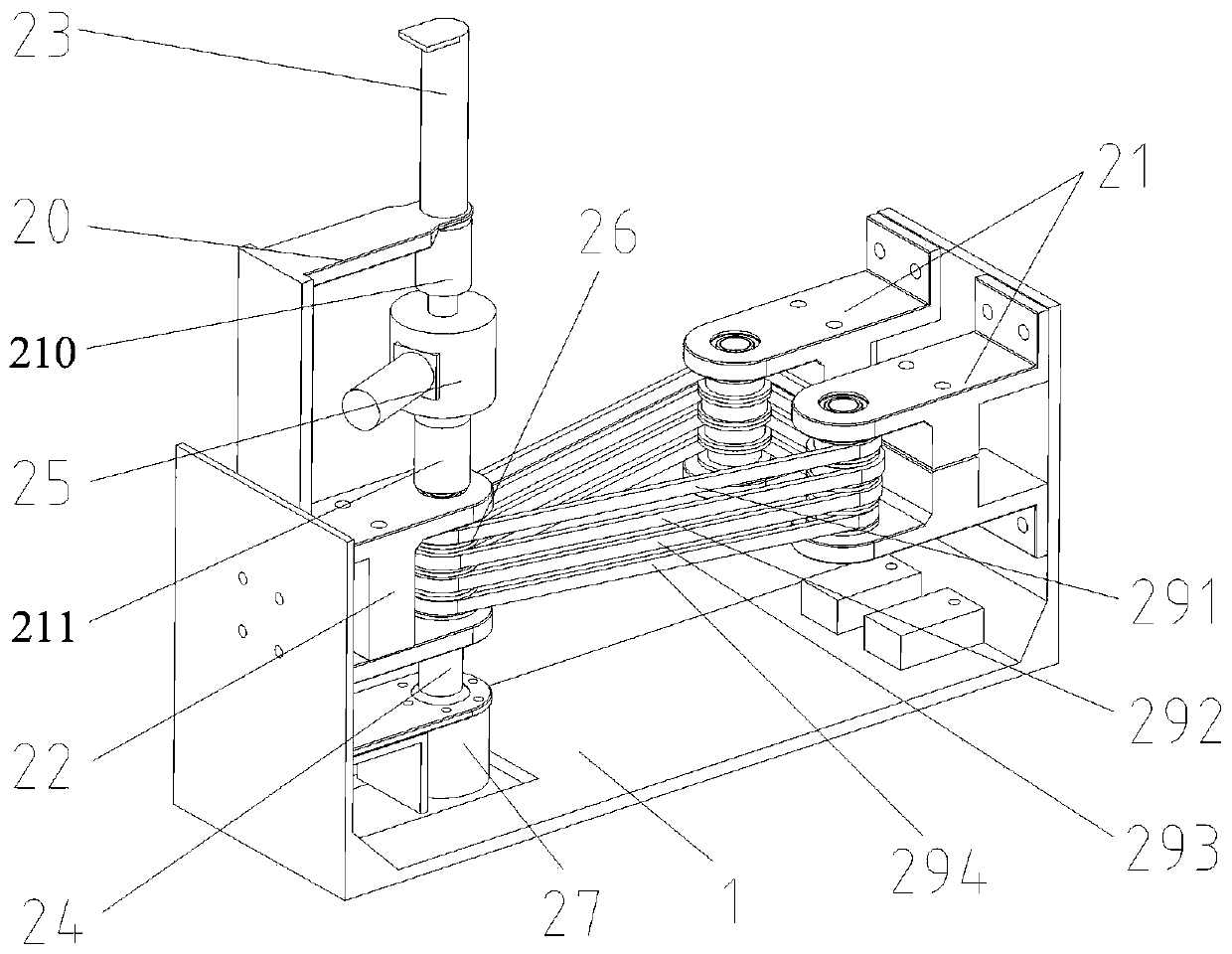
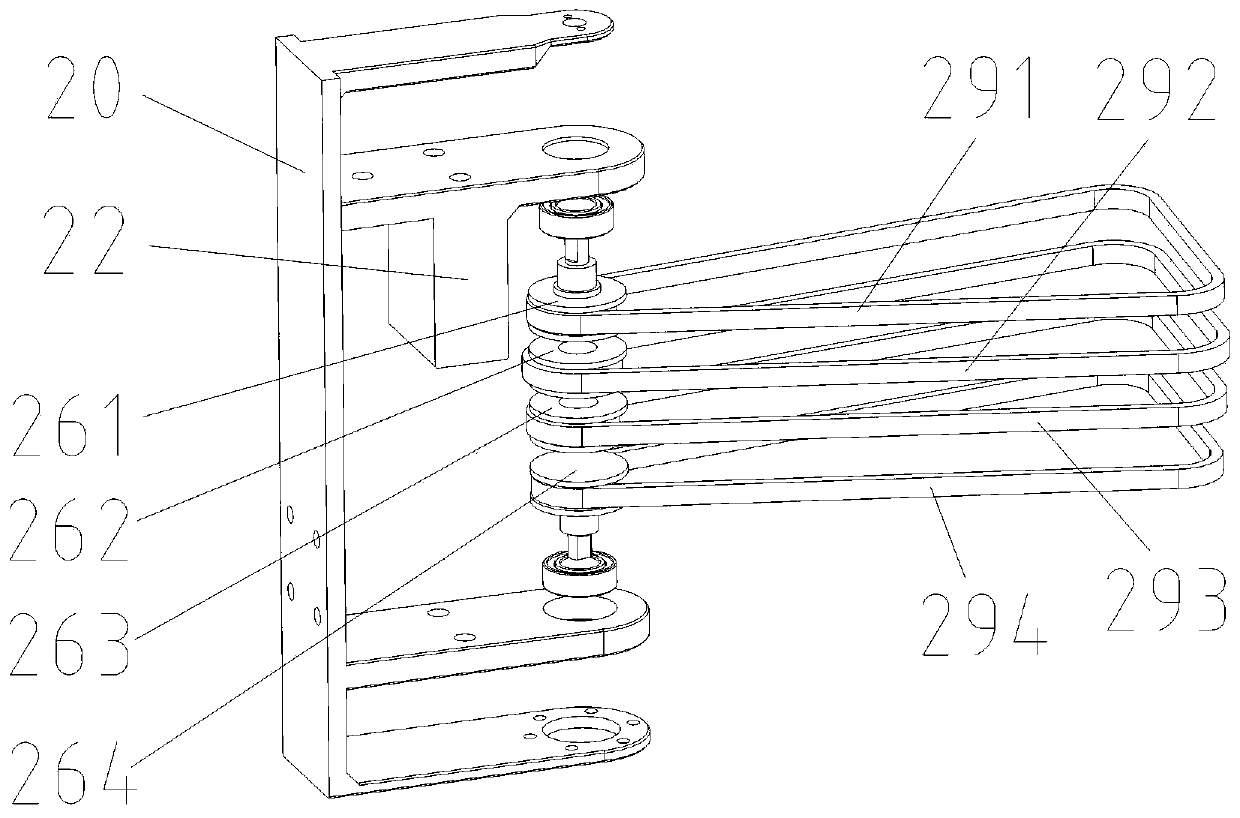
[0038] The power drive assembly 2 includes a motor bracket 20 fixed on the inner side of one end of the fixed base 1, a first bracket 21 fixed on the inner side of the other end of the fixed base 1, a second bracket 22 installed on the motor bracket 20, and a second bracket 22 installed on the motor bracket 20. The servo moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com