


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A fulcrum dynamic combined parallel mechanism for realizing high-precision positioning of a circular track platform
A rail platform, high-precision technology, used in workbenches, manufacturing tools, etc., can solve the problems of complex installation and difficult to meet the requirements of precision, and achieve the effects of high precision, fast adjustment speed, and convenient and fast operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
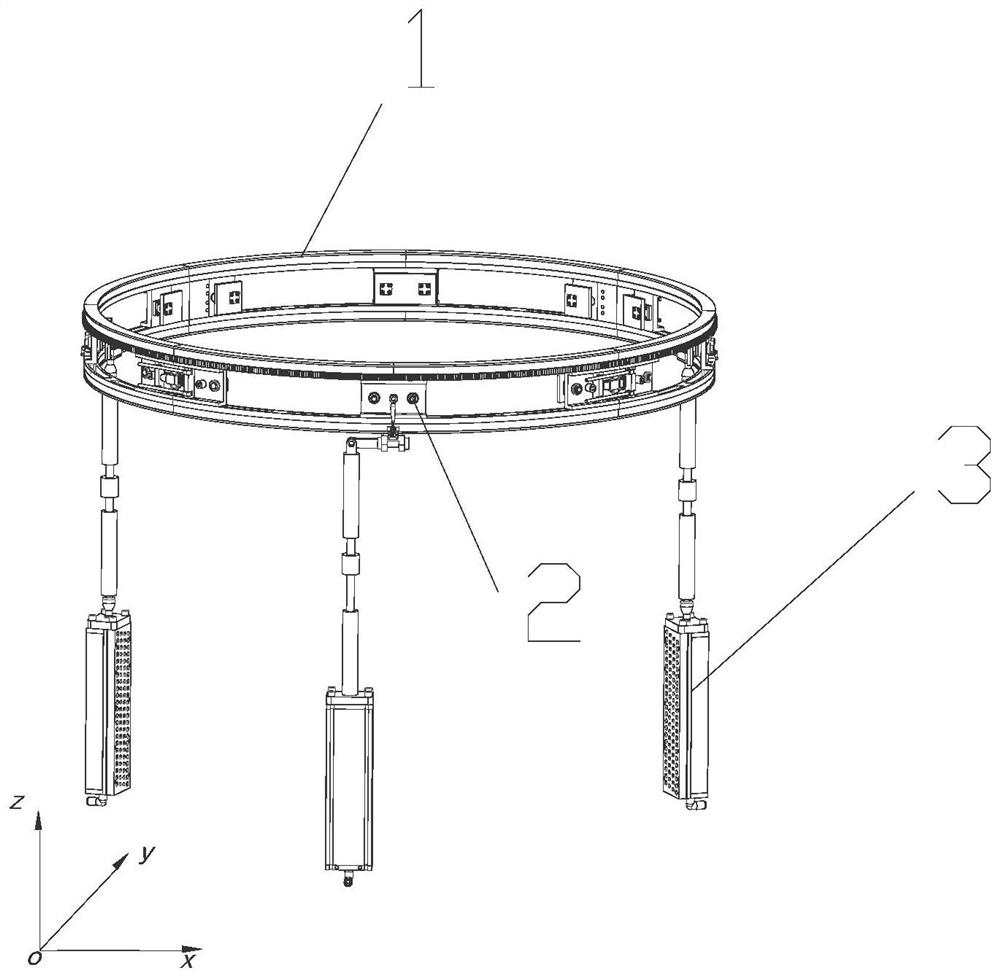
[0057] A fulcrum dynamic combined parallel mechanism for realizing high-precision positioning of a circular track platform, such as figure 1 shown, including figure 2 The horizontal position and posture adjustment device 3 and the coaxiality flexible clamping adjustment device are shown;
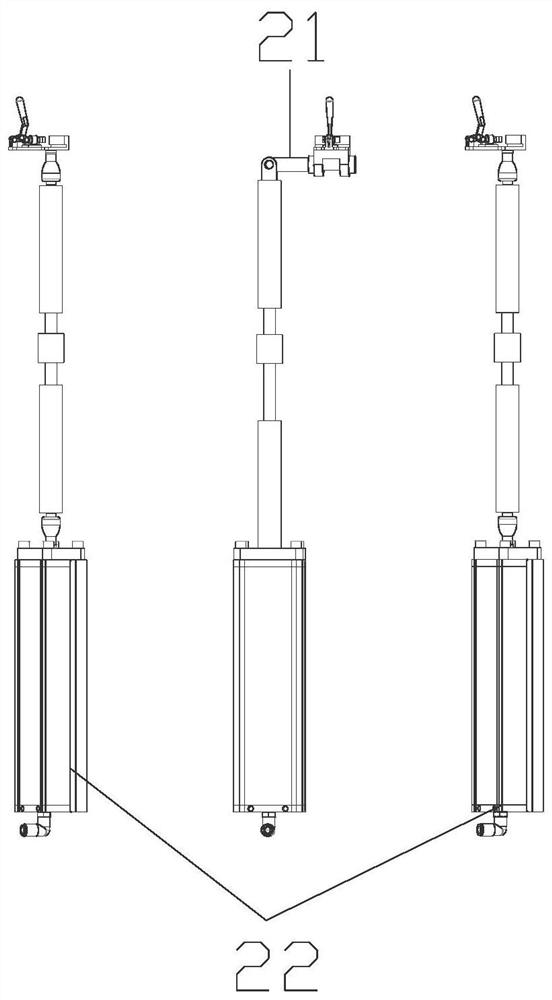
[0058] The horizontal position and attitude adjusting device 3 includes two SPS adjusting branches 32 and one PRR adjusting branch 31 located below the circular track 1 and distributed around the circumference of the circular track 1, and the above three adjusting branches form a set of 1T2R parallel mechanism, By adjusting the length of the branch chain, the level of the circular track can be positioned with high precision;
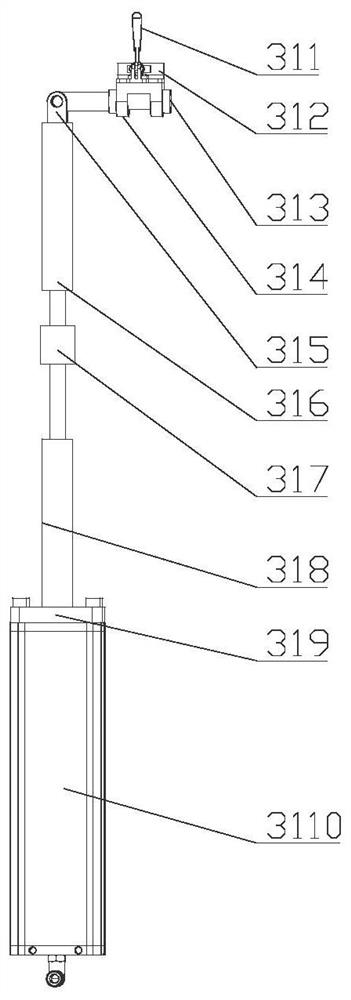
[0059] SPS modulates branch 32 as Figure 4 As shown, including the fast hand clamp (SPS, including the fast hand clamp handle (SPS) 321 and the fast hand clamp base (SPS) 322), the upper ball hinge 323, the upper spin rod ( SPS) 324, Intermediate Spinning Rod (SPS...
Embodiment 2
[0073] A fulcrum dynamic combination parallel mechanism for realizing high-precision positioning of a circular orbit platform, its structure is basically the same as that of Embodiment 1, the difference is that its horizontality posture adjustment device is three SPS adjustment branch chains.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com