A method for extracting point cloud contours of plane building components based on global graph clustering
A technology for extracting building components and contours, applied in the computer field, can solve problems such as difficulty in applying small curved surfaces to extract scenes, difficulty in determining the starting and ending range of intersection lines, etc., and achieves the effect of strong adaptability and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
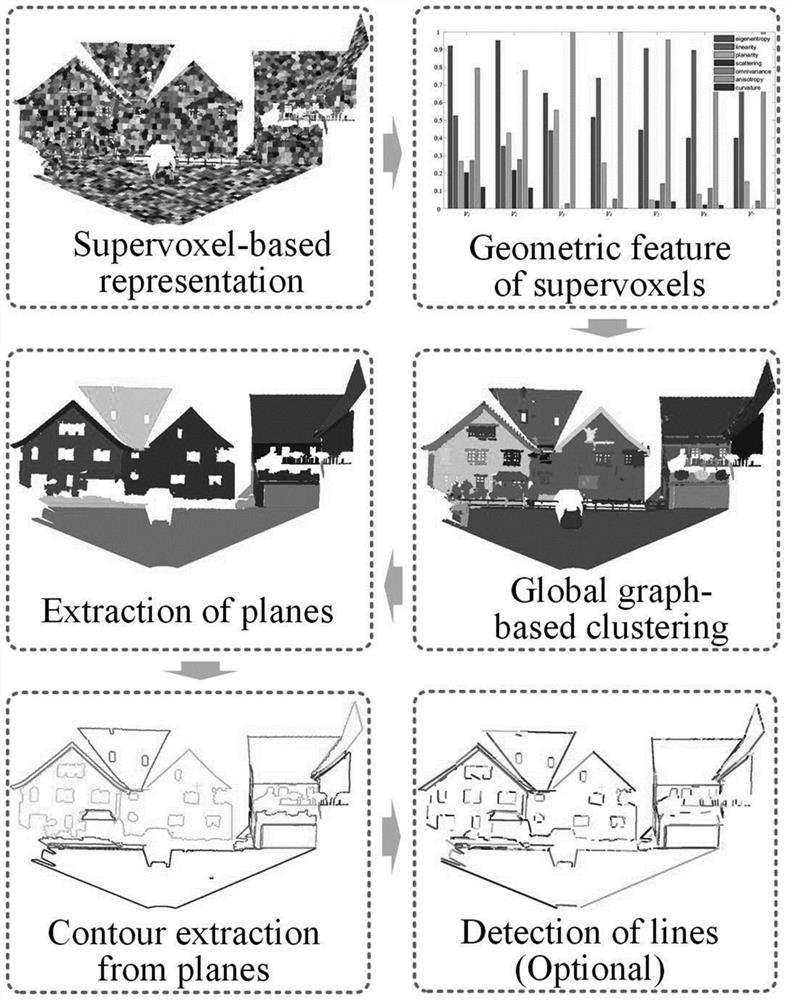
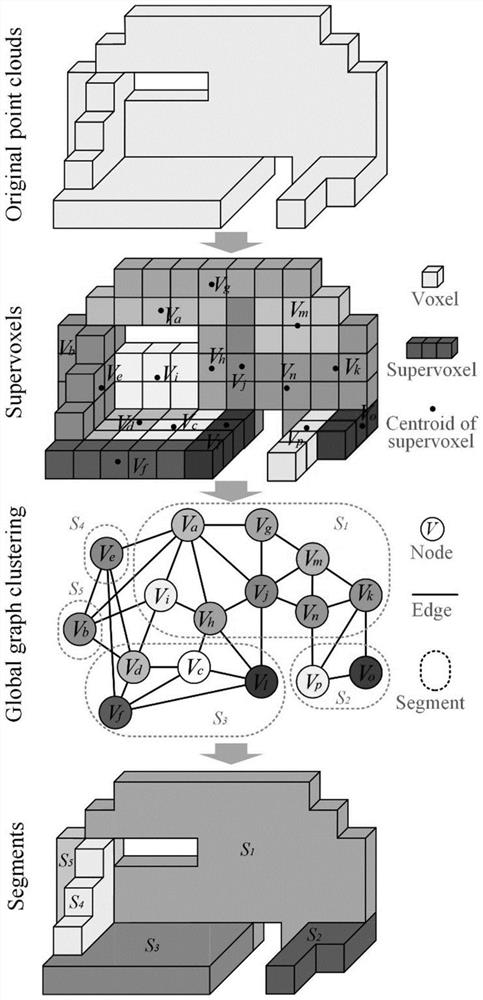
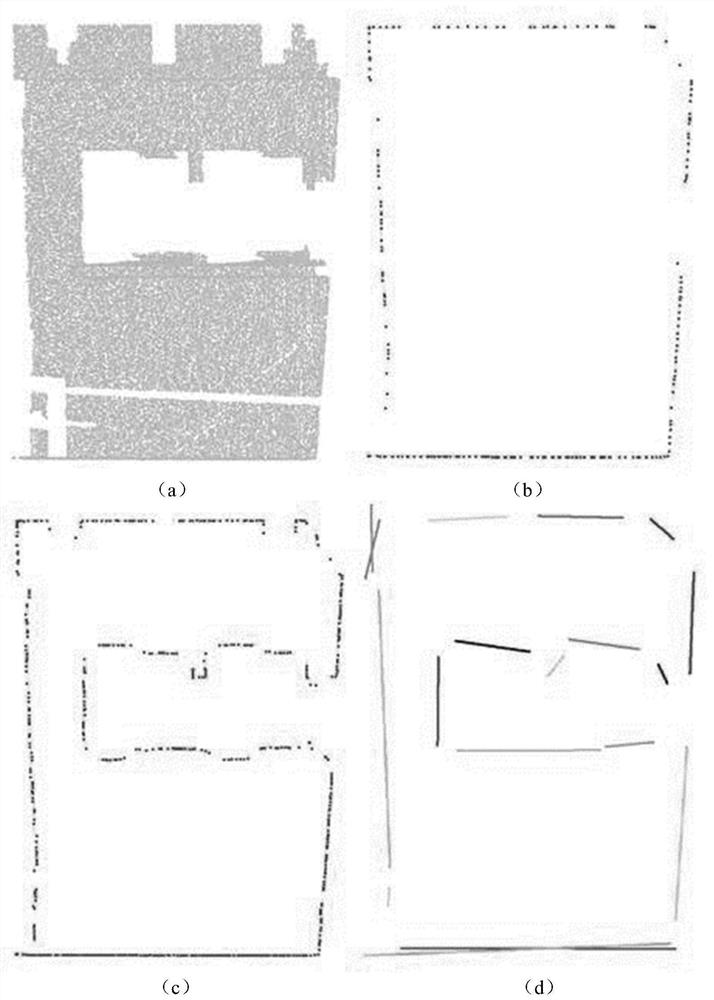
[0049] The implementation of the planar reconstruction method proposed by the present invention includes two main stages: detection and extraction of planar segments and geometric modeling of planar segments. Specifically, the first stage can be divided into point cloud segmentation and plane detection. For segmentation, a bottom-up point cloud segmentation method is proposed, which utilizes supervoxel structure and global graph-based optimization to achieve automatic and unsupervised segmentation of point clouds. A flatness-based extraction is performed on the segments in a subsequent step, and only planar segments and their neighborhoods are selected as candidates for planar fitting. The points of the plane can be identified by the parametric model given by the flatness calculation. The boundary points of the plane are then extracted by the Alpha shape. The resulting base line segments are extracted and merged by mean shift clustering. For the geometric modeling of the pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com