Remote signing robot
A robot and remote technology, applied in the field of robots, can solve problems such as long process, distortion of handwriting data, troubles, etc., achieve high reliability, save travel expenses, and realize the effect of real-time visual operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0022] The remote signature robot in this embodiment includes a signature recording end and a signature execution end connected by communication, both of which have the same structure, except that the encoder and the motor are replaced accordingly, so the following uses the signature execution end as an example for illustration.
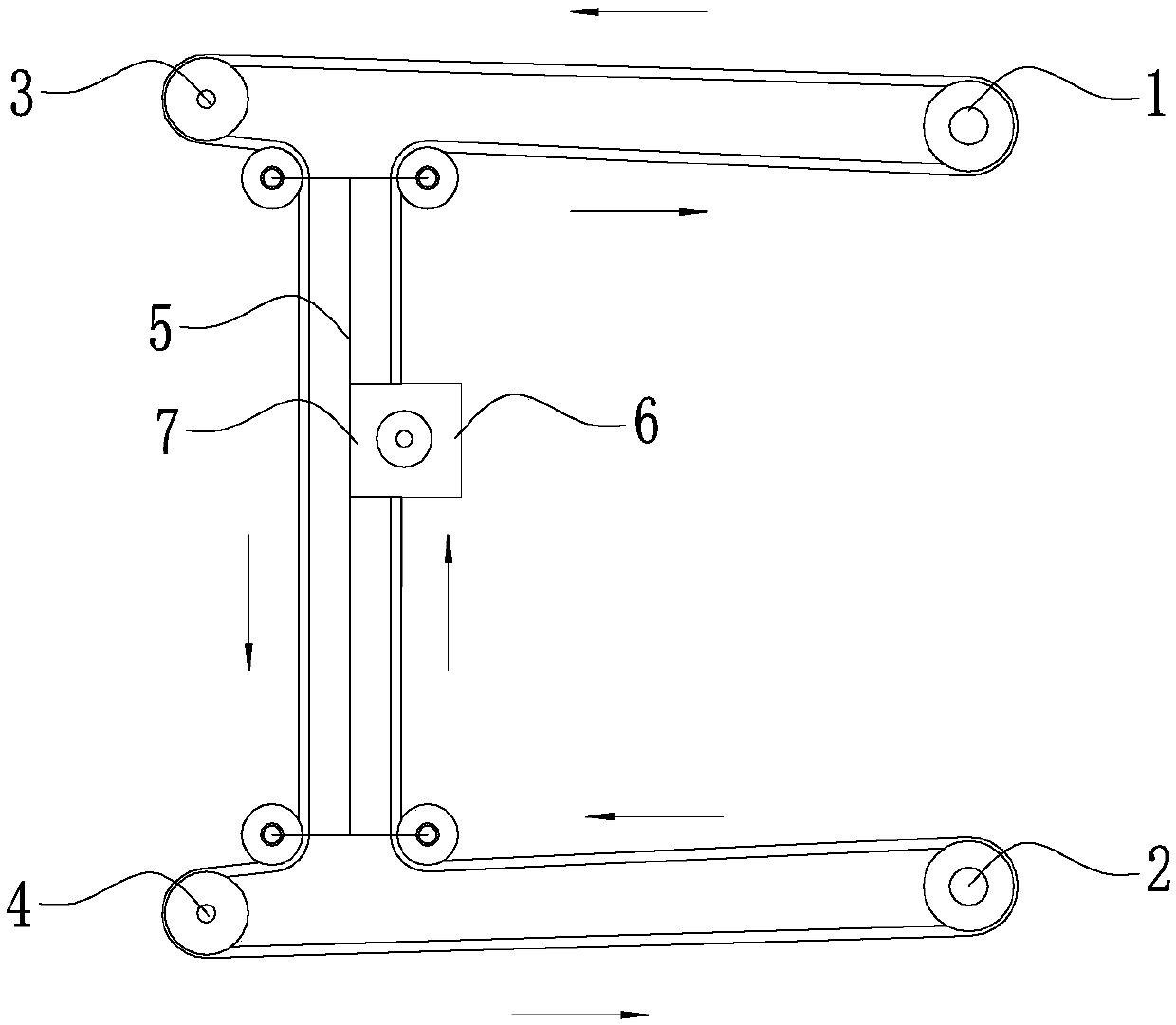
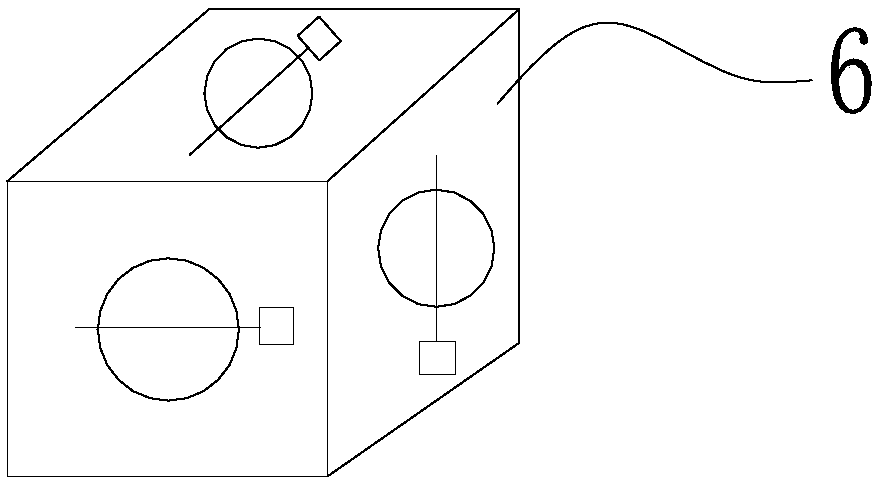
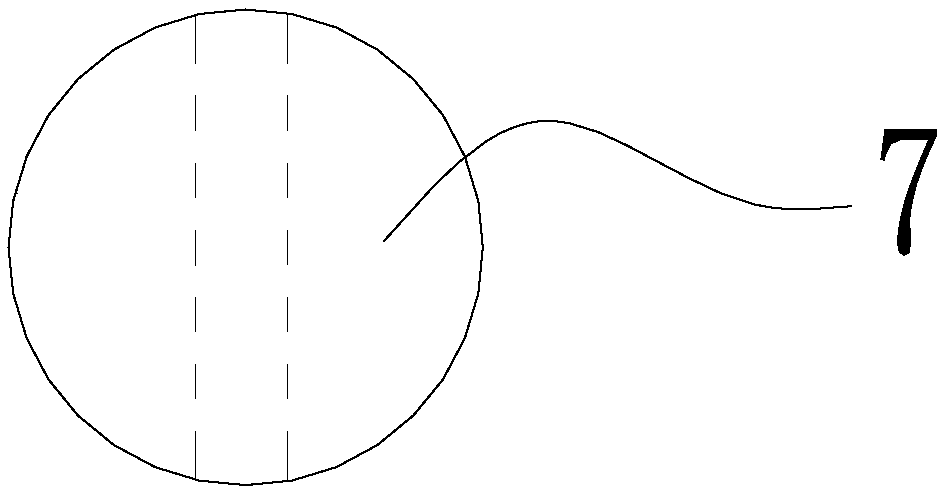
[0023] Such as figure 1 As shown, it is composed of the first fixed wheel 1, the second fixed wheel 2, the third fixed wheel 3, the fourth fixed wheel 4 installed on the four corners of the frame (omitted in the figure), and the I-shaped pen bridge 5 The four moving wheels of the four moving wheels are connected by a synchronous belt, and the gesture control mechanism is fixed on the synchronous belt, including a frame body 6 and a sphere 7.
[0024] When in use, the translation mechanism is used to drive the pen to move in the XY direction of the three-dimensional Cartesian coordinate system, and the gesture control mechanism is used to drive the pe...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap