


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot dodging method and device
A robot and avoidance distance technology, applied in the field of robotics, can solve the problems of re-encounter in another channel and the inability to realize reasonable avoidance of robots, and achieve the effect of reasonable avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
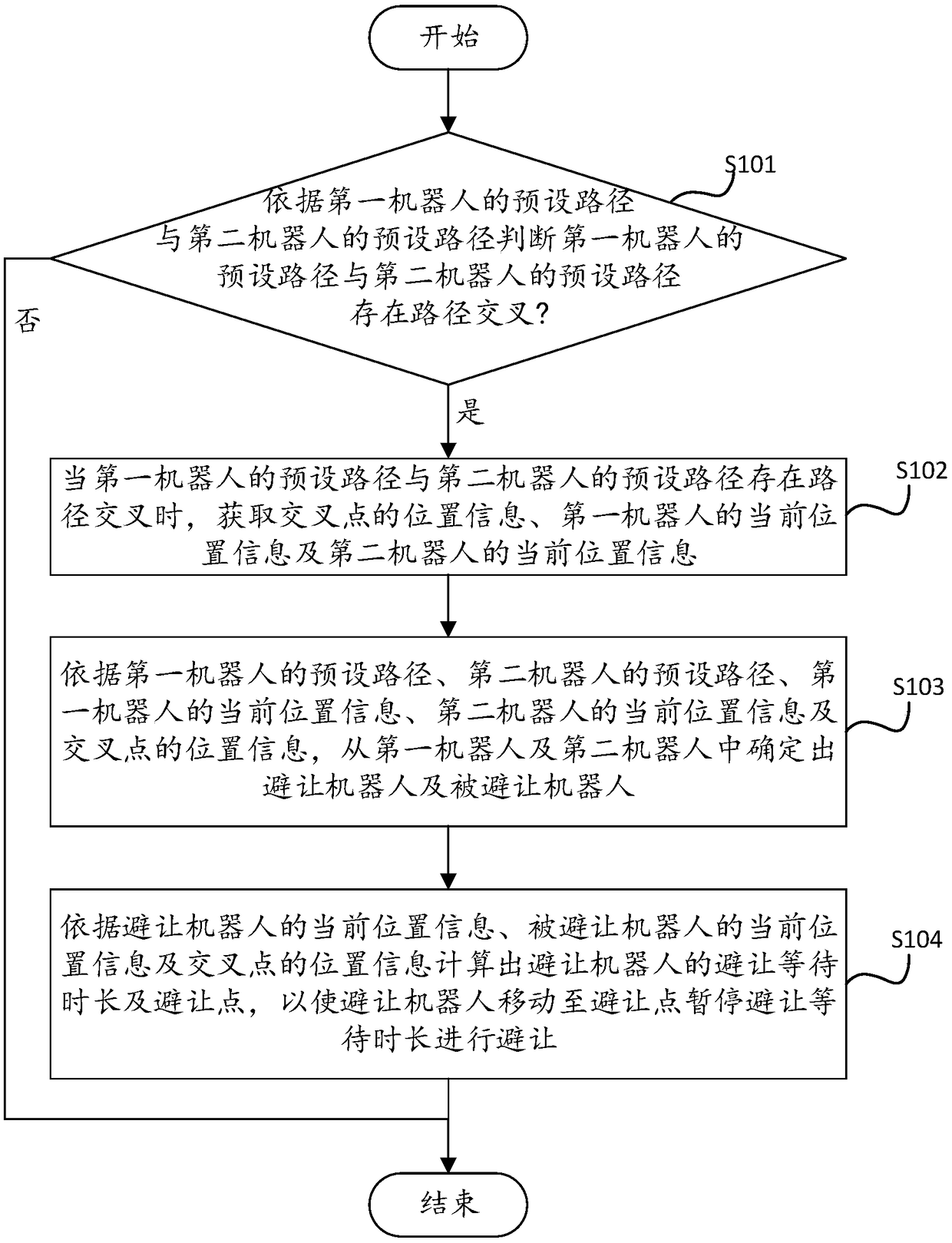
[0026] Please refer to image 3 , image 3 A flow chart of a robot avoidance method provided by an embodiment of the present invention is shown. The method includes the following steps:
[0027] Step S101 , according to the preset paths of the first robot and the preset paths of the second robot, it is judged whether there is a path intersection between the preset paths of the first robot and the preset paths of the second robot.
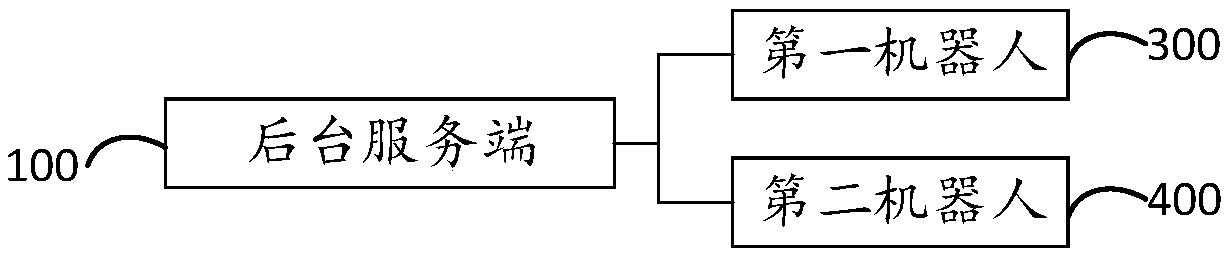
[0028] In the embodiment of the present invention, the preset path of the first robot 300 is the movement path planned by the background server 100 for the first robot 300 in advance, and the preset path of the first robot 300 includes at least two sequentially arranged One navigation point, the first robot 300 passes through each first navigation point in turn according to the order of the first navigation points, the preset path of the second robot 400 is the movement path planned by the background server 100 in advance for the second robot 400, t...
Embodiment approach
[0029] As an implementation, the method of judging whether there is a path intersection between the preset path of the first robot 300 and the preset path of the second robot 400 according to the preset path of the first robot 300 and the preset path of the second robot 400 may be :
[0030] First, calculating a plurality of navigation distances between each first navigation point and each second navigation point;
[0031] Secondly, the multiple navigation distances are sorted to obtain the minimum navigation distance among the multiple navigation distances;
[0032] Finally, when the minimum navigation distance is less than the preset safety distance, it is determined that there is a path intersection between the preset path of the first robot and the preset path of the second robot.
[0033] In the embodiment of the present invention, the preset safe distance refers to the minimum distance value that can pass smoothly without changing the current moving path when the first ...
no. 2 example
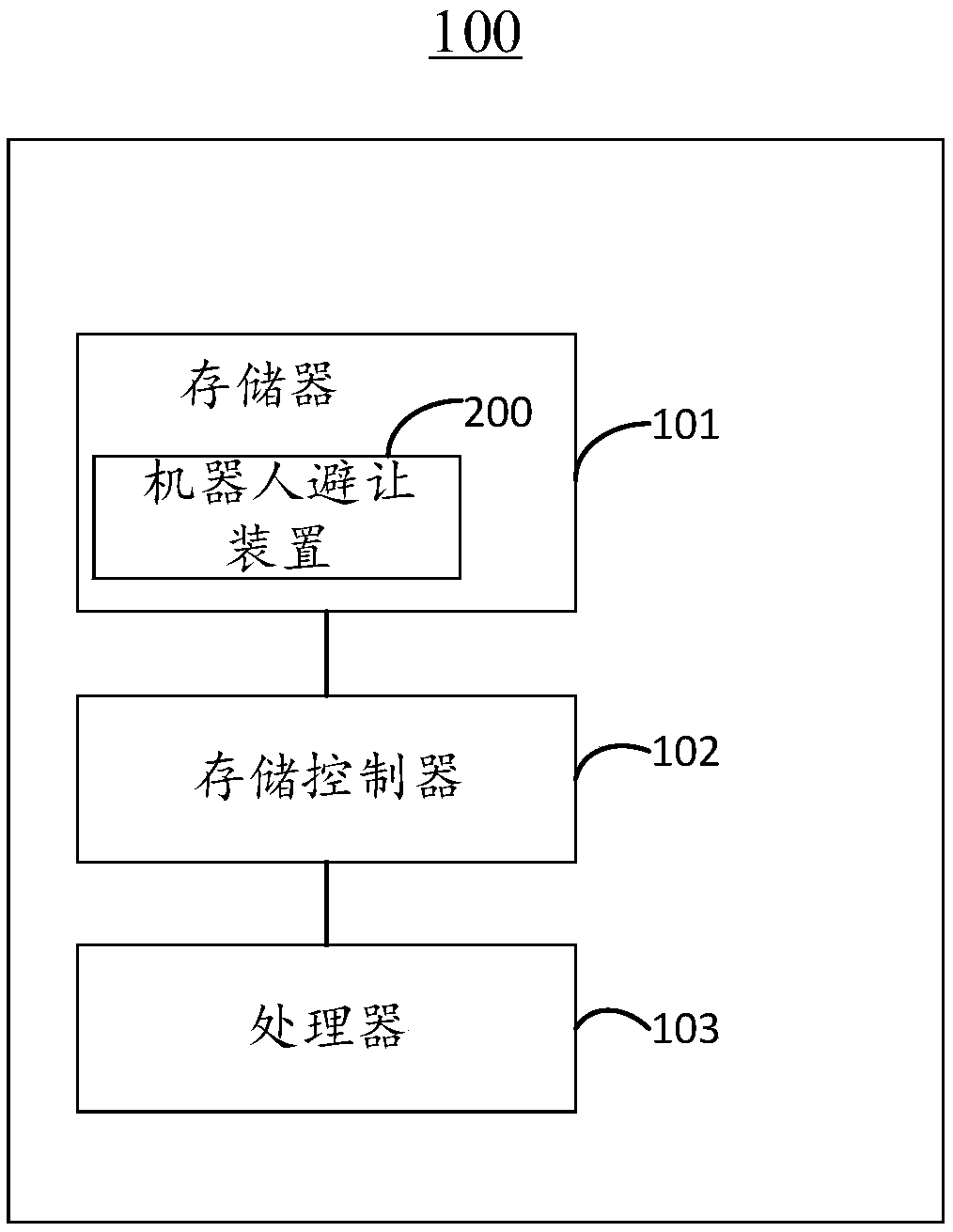
[0099] Please refer to Image 6 , Image 6 A schematic block diagram of a robot avoidance device 200 provided by an embodiment of the present invention is shown. The robot avoidance device 200 is applied to the background server 100 , which includes a judgment module 201 ; an acquisition module 202 ; a determination module 203 ; and an avoidance module 204 .
[0100] The judging module 201 is configured to judge whether there is a path intersection between the preset paths of the first robot and the preset paths of the second robot according to the preset paths of the first robot and the preset paths of the second robot.
[0101] In the embodiment of the present invention, the acquiring module 201 is configured to execute step S101.
[0102] The acquiring module 202 is configured to acquire the position information of the intersection point, the current position information of the first robot, and the current position information of the second robot when the preset path of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com