An inspection and positioning method and an inspection and positioning system for an intelligent inspection robot
An inspection robot and intelligent inspection technology, applied in the field of intelligent robots, can solve problems such as difficult to effectively eliminate safety hazards, blurred video, and low inspection efficiency, so as to improve efficiency and inspection quality, reduce cumulative driving errors, and comprehensive train inspection Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
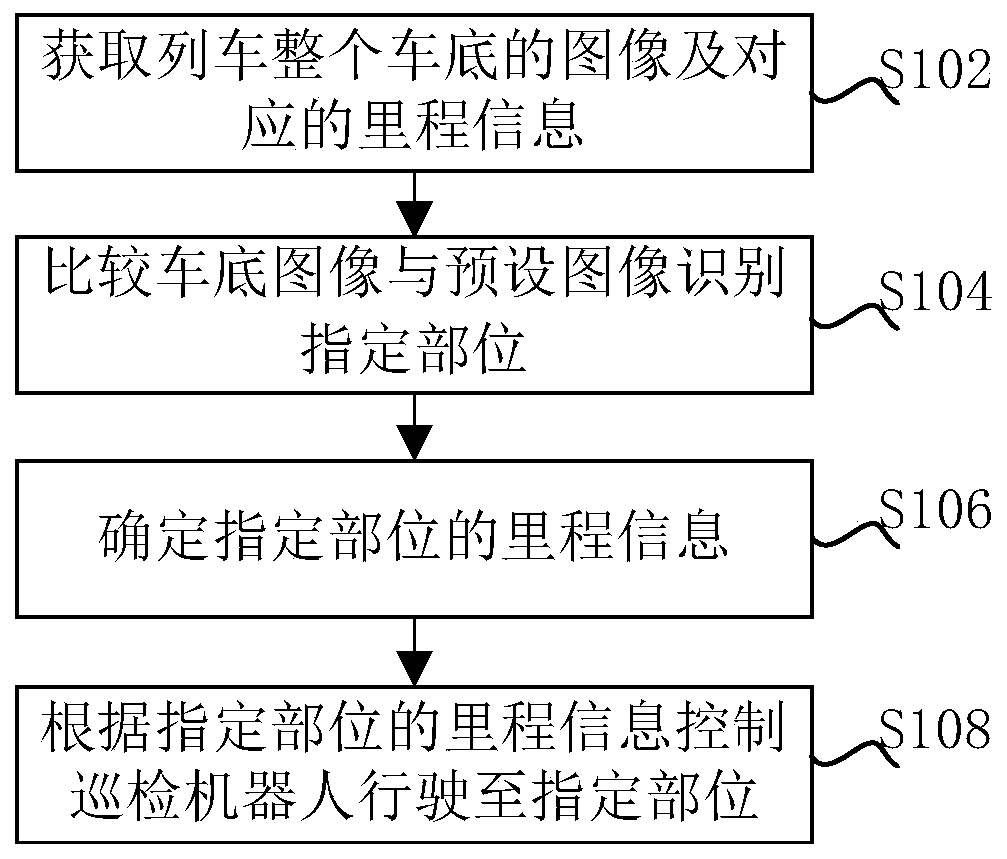
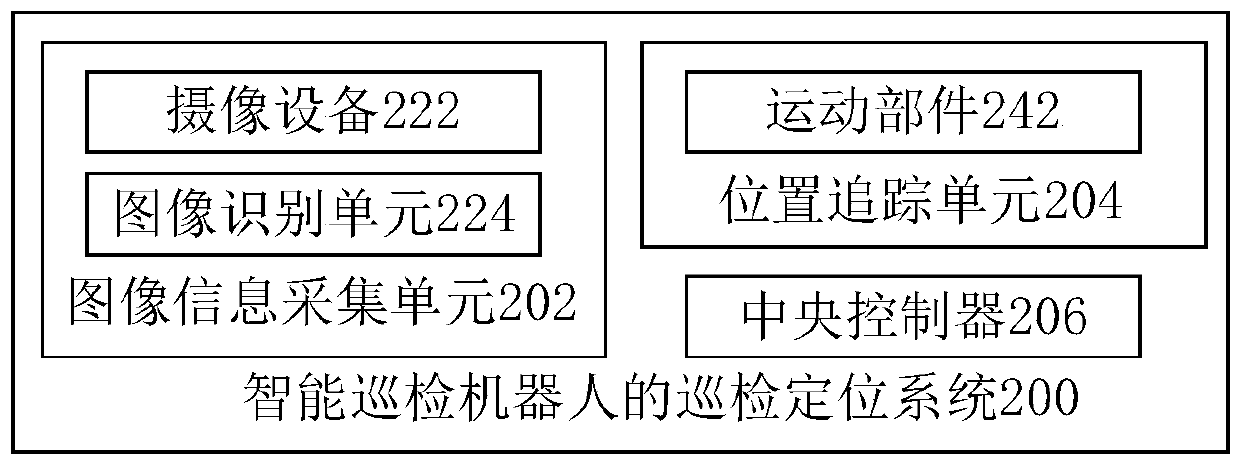
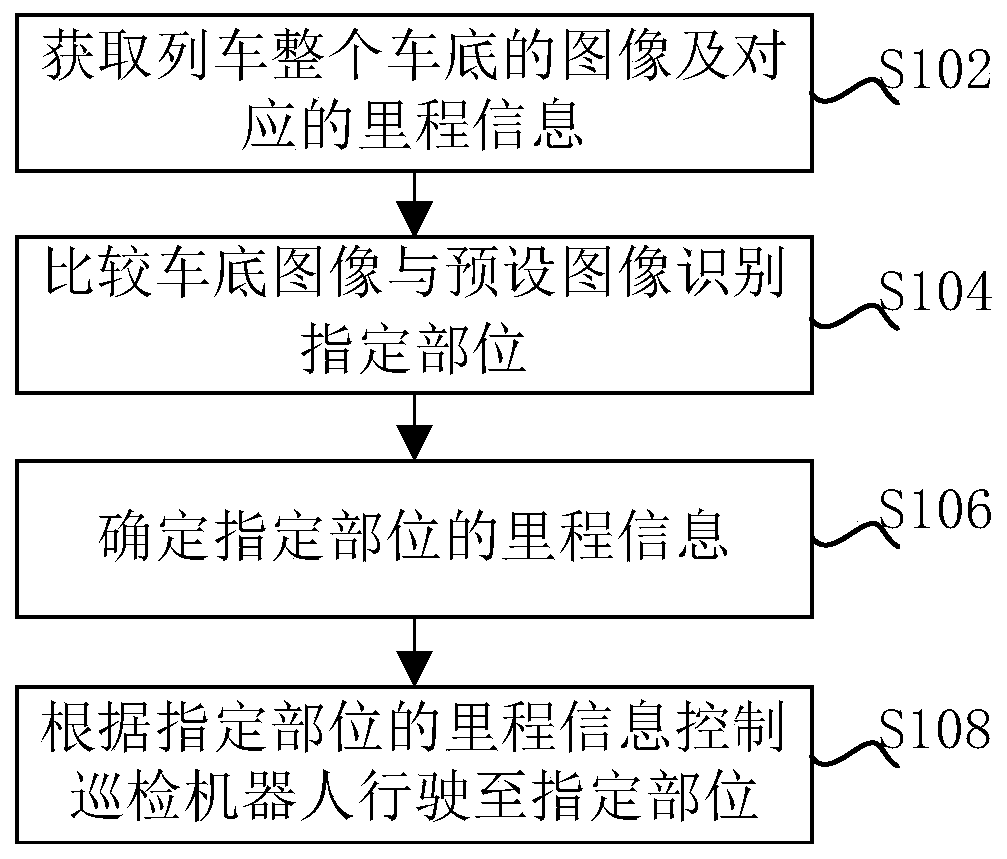
[0054] figure 1 A flowchart showing an inspection and positioning method of an intelligent inspection robot according to an embodiment of the present invention, figure 2 A structural block diagram of an inspection and positioning system of an intelligent inspection robot according to another embodiment of the present invention is shown.
[0055] Such as figure 1 As shown, the inspection and positioning method of the intelligent inspection robot includes: S102: Obtain the entire undercarriage image of the train and the corresponding mileage information; S104: Compare the undercarriage image with the preset image to identify the designated part; S106: Determine the location of the designated part Mileage information; S108: Control the inspection robot to travel to the designated location according to the mileage information of the designated location.
[0056] Among them, the distance information between adjacent designated parts is obtained, and when the inspection robot fin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com