Collaborative control method for trajectory and attitude of swarm unmanned aerial vehicle (UAV) oriented to security domain
A technology oriented to safety and collaborative control, applied in the field of UAV aircraft control and coordinated control of the trajectory and attitude of cluster UAVs, it can solve problems such as increased computational complexity, and achieve the effect of weakening the requirements of positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
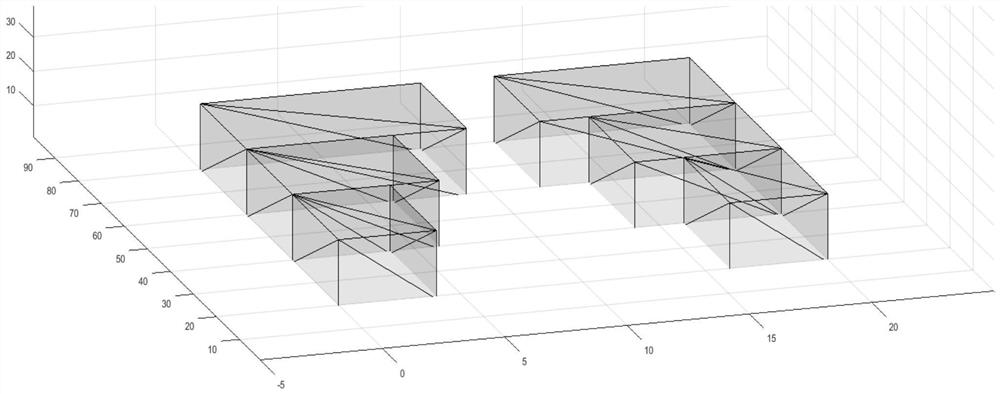
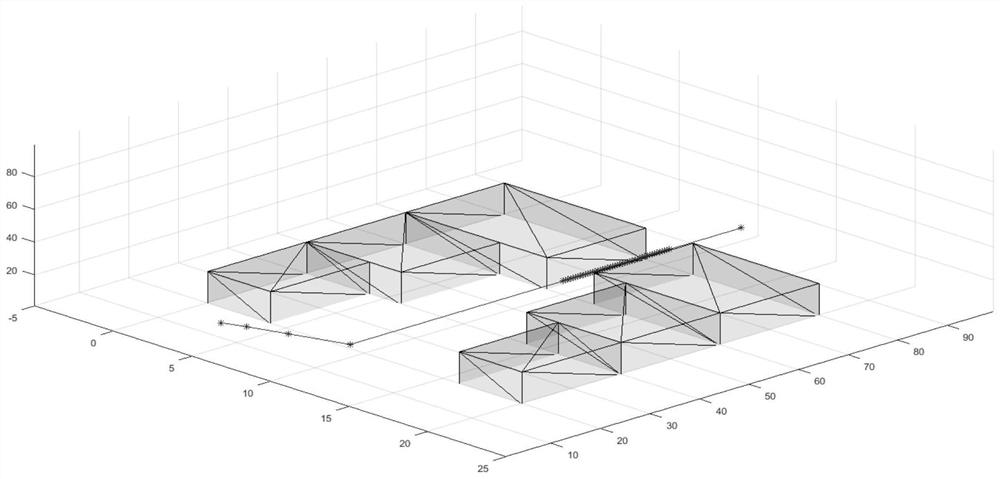
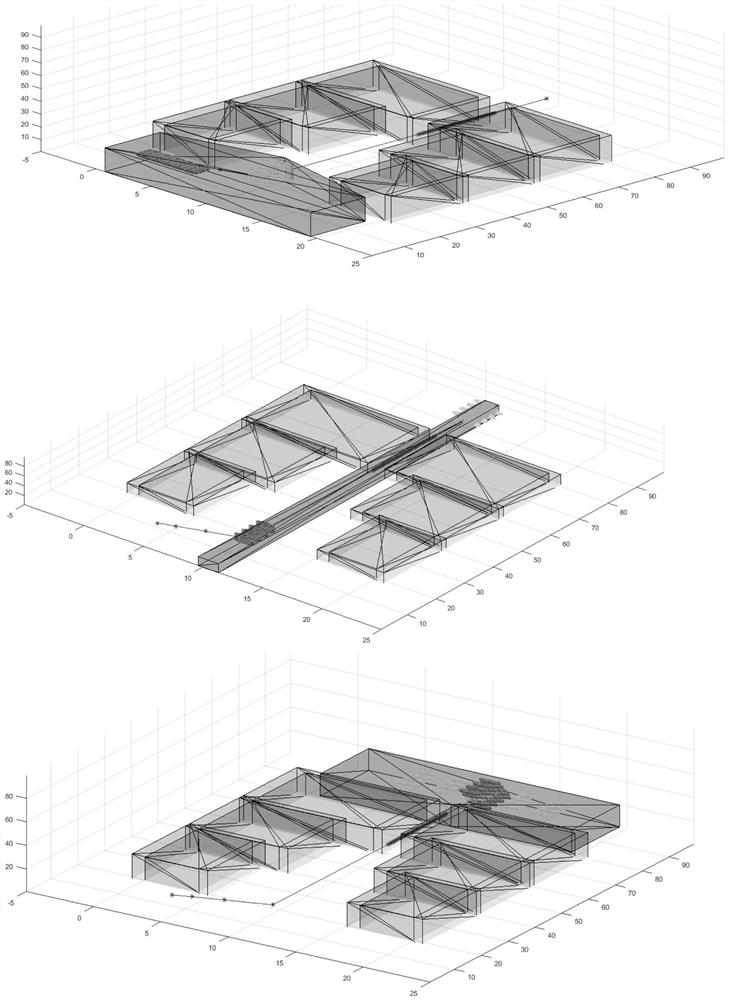
[0126] Aiming at the deficiencies of the existing control strategies, the present invention uses the idea of distribution, and proposes for the first time a collaborative control method for the trajectory and attitude of clustered UAVs oriented to the security domain. In this method, by designing the trajectory of the central point of the cluster UAV, the safe flight area and the distributed cooperative control strategy, it is ensured that the cluster UAV can fly around obstacles safely and without collision and fly towards their respective target areas from the designated starting point. In the absence of global information, a UAV only relies on neighboring aircraft information to achieve coordination.
[0127] The invention relates to the technical field of flight control of a quadrotor unmanned aerial vehicle. Specifically, a collaborative control method for the trajectory and attitude of clustered drones that is different from the traditional clustered drones in the past...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com