Positioning module and robot having the same
A positioning module and robot technology, applied in the field of robotics, can solve the problems of occupying too many system resources, affecting the positioning function of the robot lawn mower, and difficult to identify interference light, and achieve the effect of reducing interference light
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
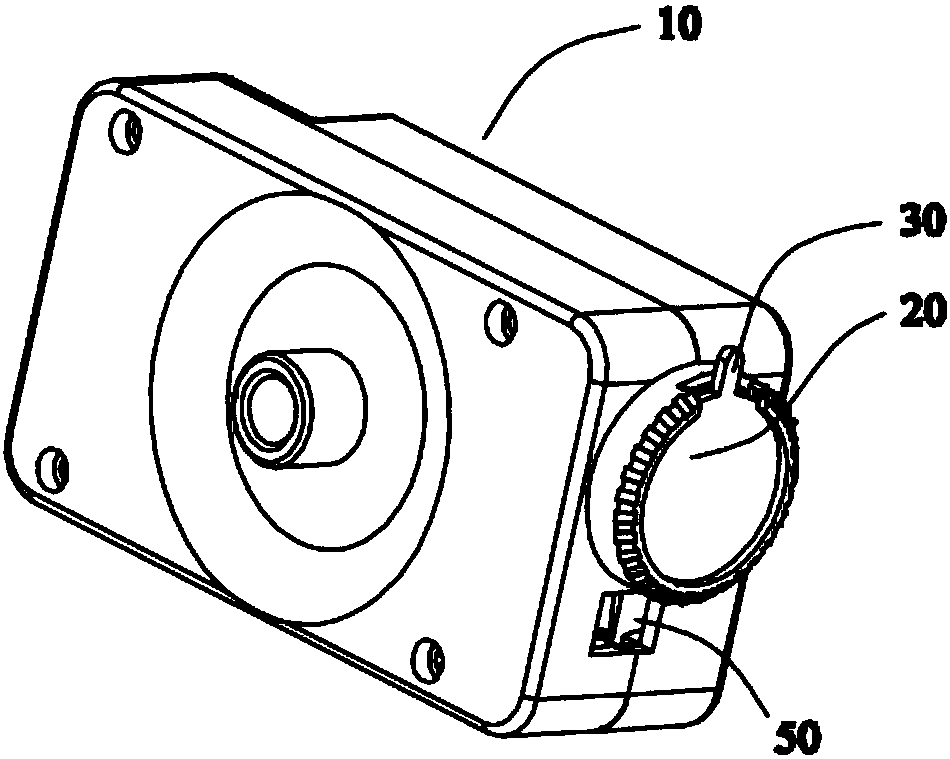
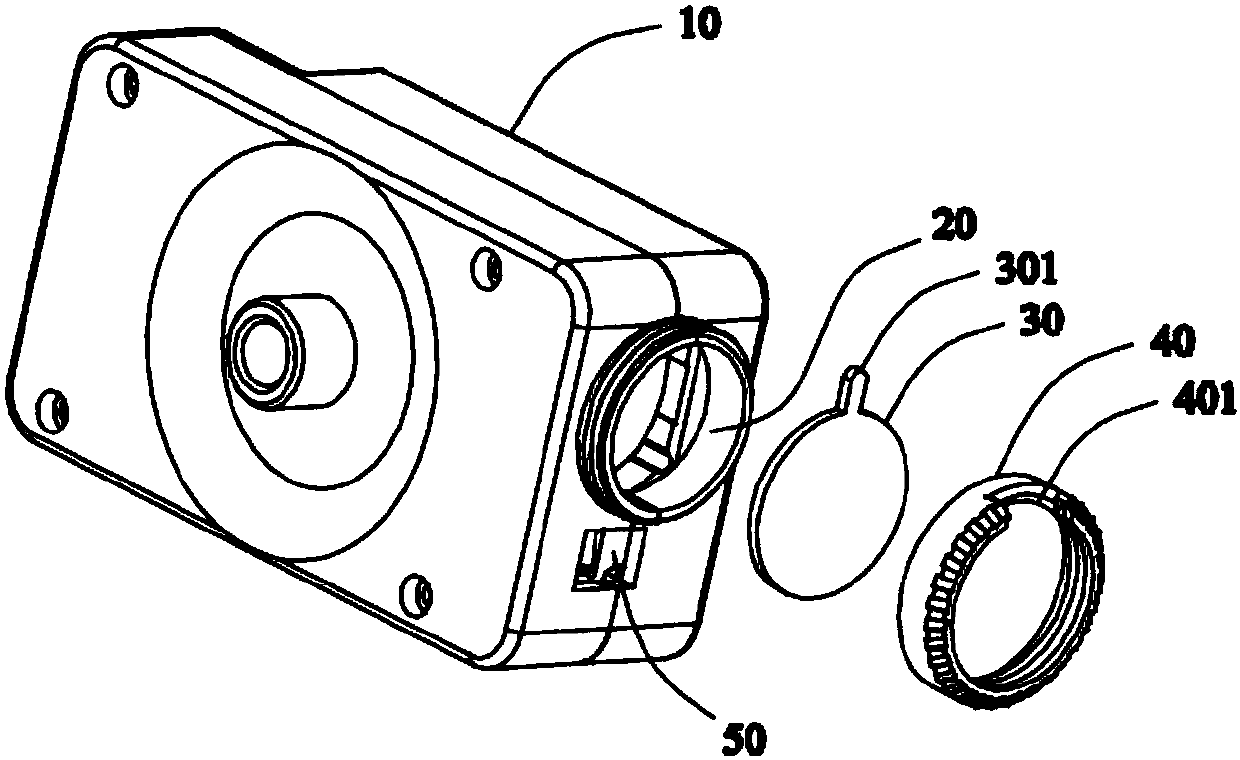
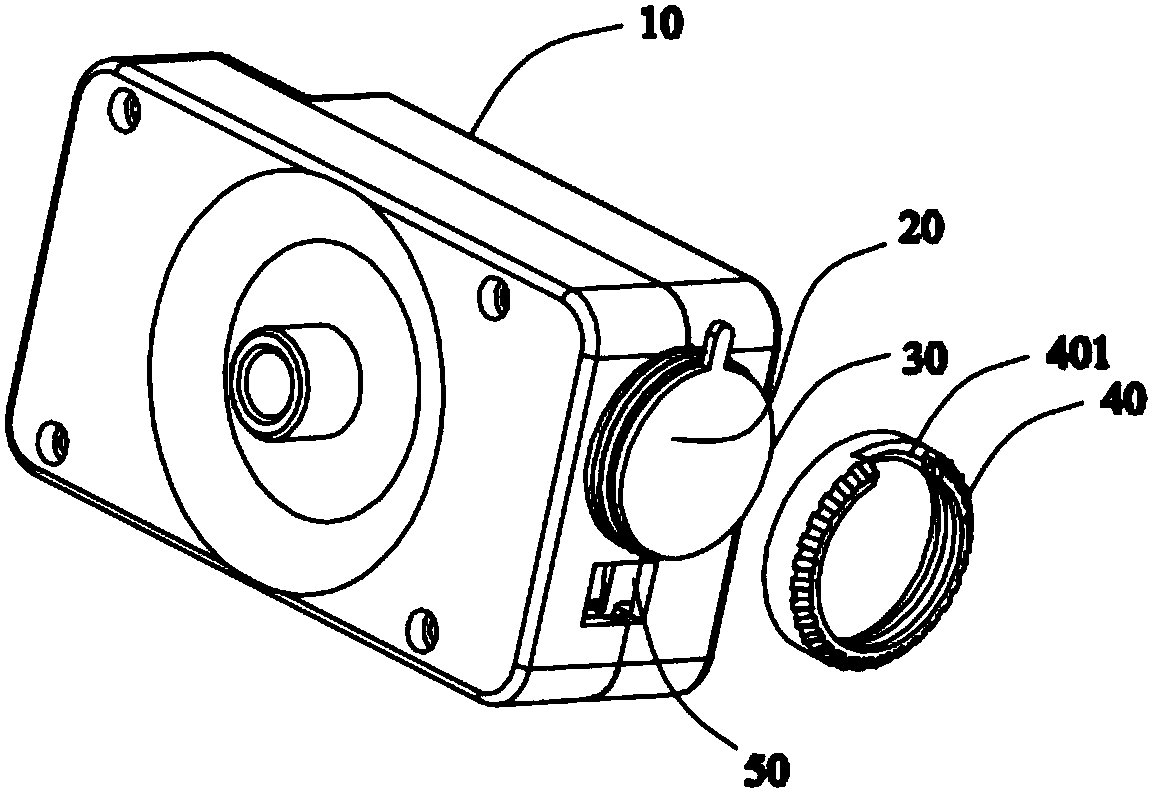
[0041] refer to Figure 1 to Figure 3 , The laser receiving end 20 is set on the laser positioner 10 . The receiving end 20 has a protrusion protruding from the surface of the laser pointer 10 . A polarizer 30 is arranged on the front side of the receiving lens of the receiving end 20 . The polarizer 30 is a lens and may be circular. The polarizer 30 is configured with an adjusting rod 301 for adjusting the polarization direction. The adjustment rod 301 is a rod-shaped protrusion extending radially away from the center of the polarizer 30 , and the adjustment rod 301 is coplanar with the polarizer 30 .
[0042] The polarizer 30 can be placed on the front end of the receiving end 20 and locked by the locking member 40 . The side walls of the locking member 40 form a ring-shaped accommodation cavity, which matches the shape of the polarizer 30 so that the polarizer 30 can be accommodated in the middle of the ring. Several circles of threads are provided on the inside of the...
Embodiment 2
[0048] The difference between this example and Embodiment 1 is that the adjustment rod is a rod-shaped protrusion extending in a direction at an angle to the plane where the polarizer is located, and the adjustment rod is not coplanar with the main body of the polarizer, that is, the adjustment rod is in the same plane as the polarizer. The plane of the main body is raised in an angled direction (not shown).
[0049] The adjustment rod is accommodated in the notch of the locking member, and the distal end of the adjustment rod protrudes outward through the notch to become a force-bearing end when adjusting the polarization direction.
Embodiment 3
[0051] refer to Figure 8 , the housing of the laser positioner 10 is a separate design, and after being fastened together, it can partially surround and form the protrusion of the receiving end 20 . The protruding portion is a cylindrical hollow cavity, matching the shape of the polarizer 30 so that the periphery of the polarizer 30 can be accommodated in the cavity.
[0052] The polarizer 30 is configured with an adjusting rod 301 for adjusting the polarization direction. The adjustment rod 301 is a rod-shaped protrusion extending radially away from the center of the polarizer 30 .
[0053] The casing is provided with a notch 401 for accommodating the adjusting rod 301 . The distance between the farthest end of the adjustment rod 301 and the center of the polarizer 30 is greater than the distance between the far end of the notch 401 and the axis of the protrusion, so that when the polarizer 30 is accommodated in the protrusion, the far end of the adjustment rod 301 passes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com