Method and system for UAV sweep trajectory generation and speed planning in isolated island area
A speed planning and trajectory generation technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of frequent UAV attitude changes, low applicability, and reduced tracking performance, and solve the problem of island sweeping , High applicability and small change in attitude
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
[0061] The present invention provides a method for generating and speed planning the sweeping trajectory of an unmanned aerial vehicle in an isolated island area, comprising:
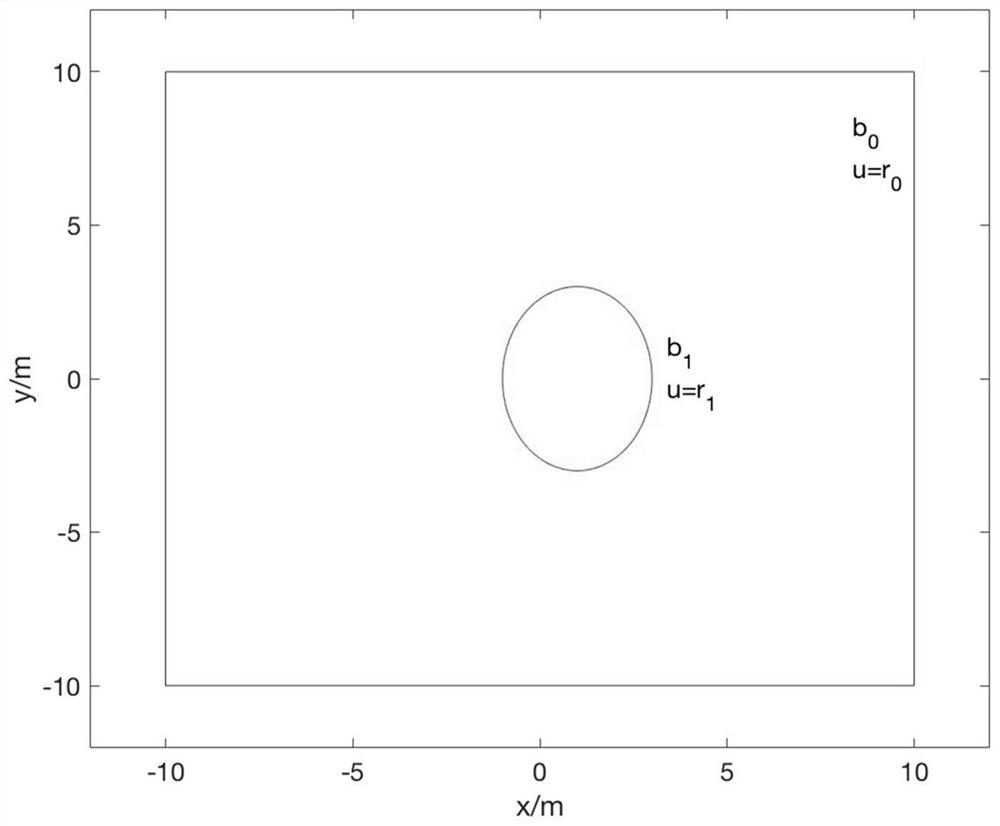
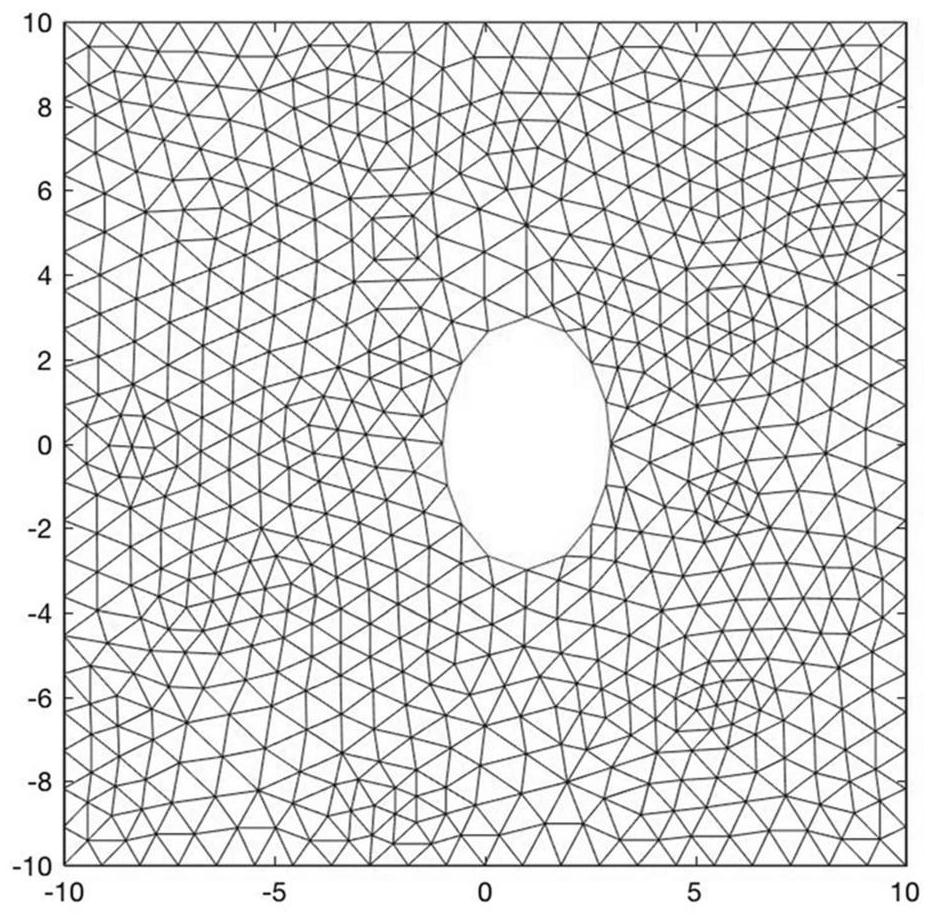
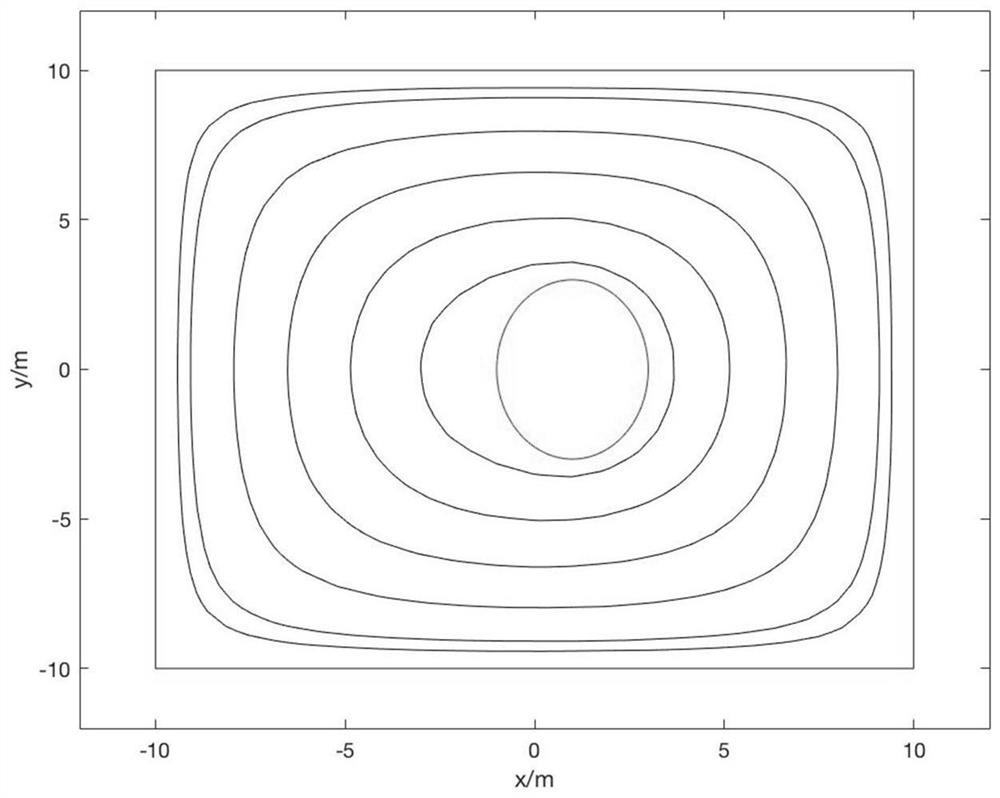
[0062] 1. Partial differential equation solution steps: construct a partial differential equation according to the given regional boundary conditions, and use finite element or difference method to solve the partial differential equation. Such as figure 1 As shown in , the box is the outer boundary of the swept area, and the inn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com