Vehicle driving risk prediction method based on time varying state transition probability markov chain
A technology of Markov chain and transition probability, applied in the direction of instruments, data processing applications, resources, etc., can solve the problems of single early warning parameter, unfavorable driving risk model accuracy and prediction accuracy, and cannot fully reflect the internal evolution law of driving state, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited thereto.
[0040] Such as figure 1 As shown, a driving risk prediction method based on time-varying state transition probability Markov chain, including steps:
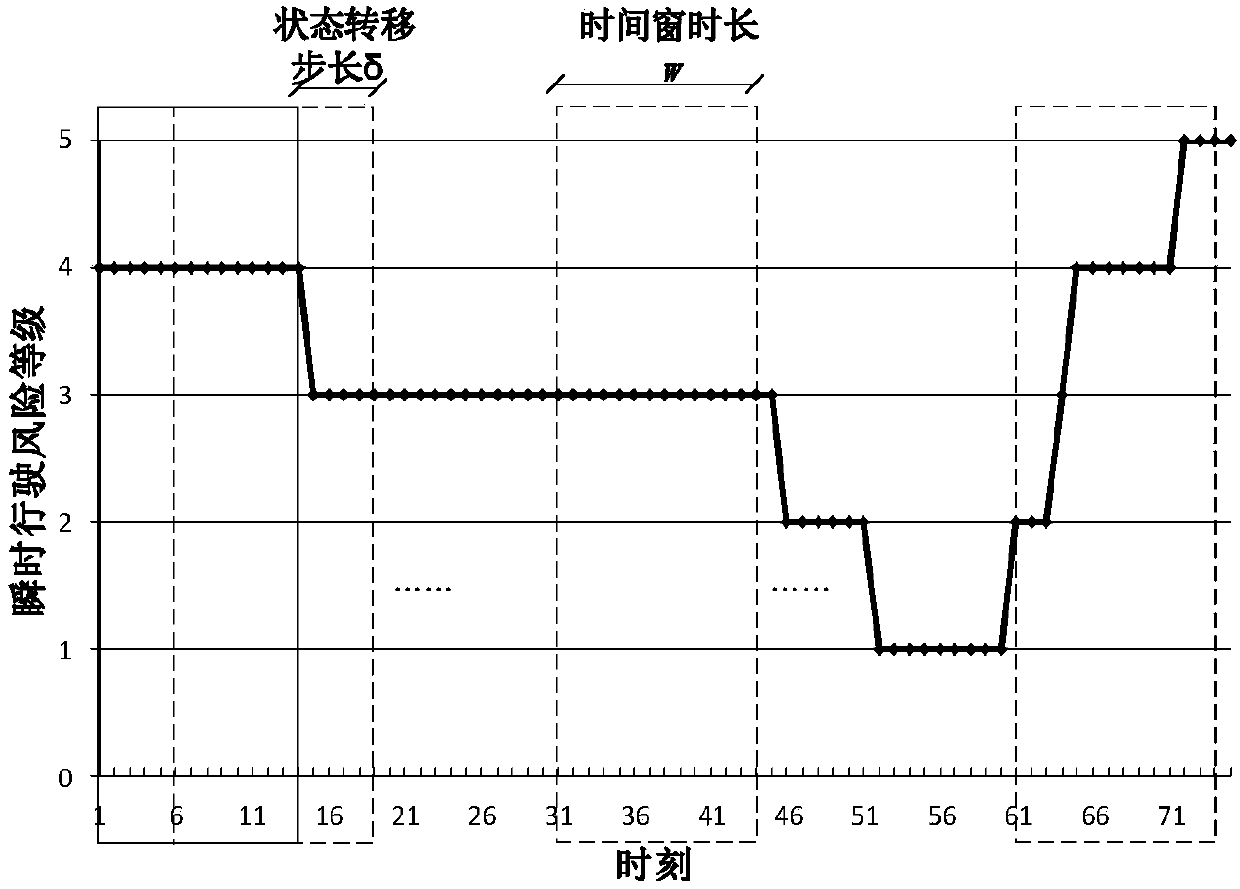
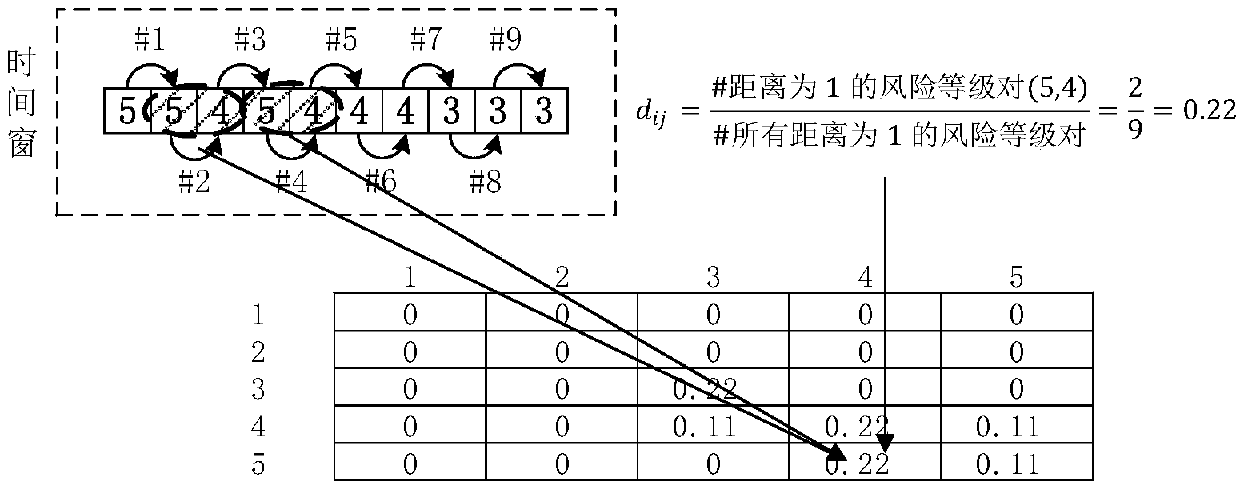
[0041] Step 1: Offline driving risk prediction model training: On the basis of natural driving database accidents and near-accident samples, select the time window characteristic parameters based on vehicle driving characteristics, divide the real-time driving risk status by clustering the characteristic parameters and use them as The Markov chain can list the state; based on the time window characteristic parameters and the driver, road, and environmental variable parameters under different driving risk states, a multinomial logistic model of driving risk state transition under different driving risk states is established;
[0042] The implementa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com