A Point Cloud Registration Method Based on Differential Evolution Algorithm and TrimMedicp Algorithm
A differential evolution algorithm and point cloud registration technology, applied in the fields of reverse engineering, computer graphics, and surveying and mapping, can solve problems such as low computational complexity and large data complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The present invention is described in further detail below in conjunction with accompanying drawing:
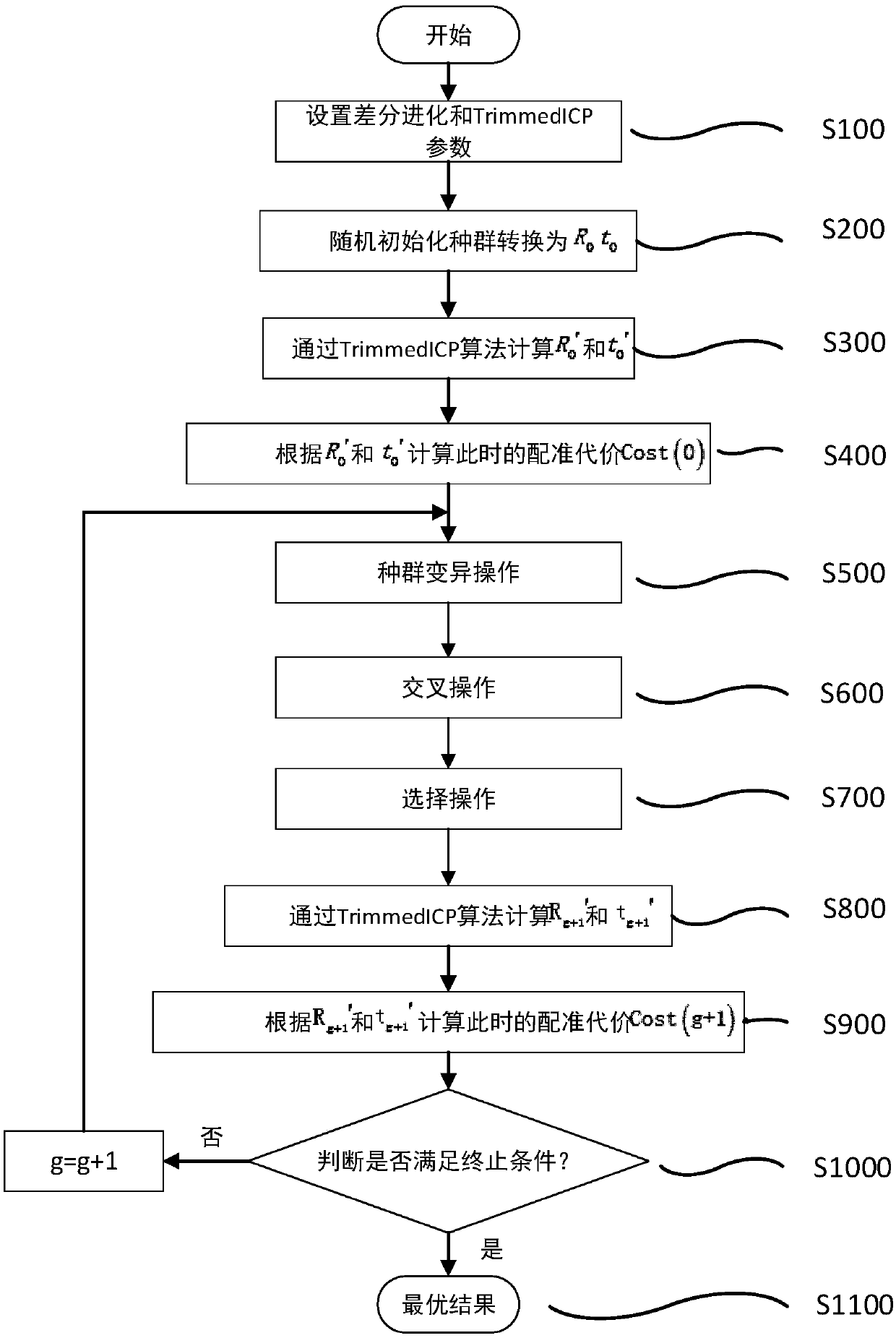
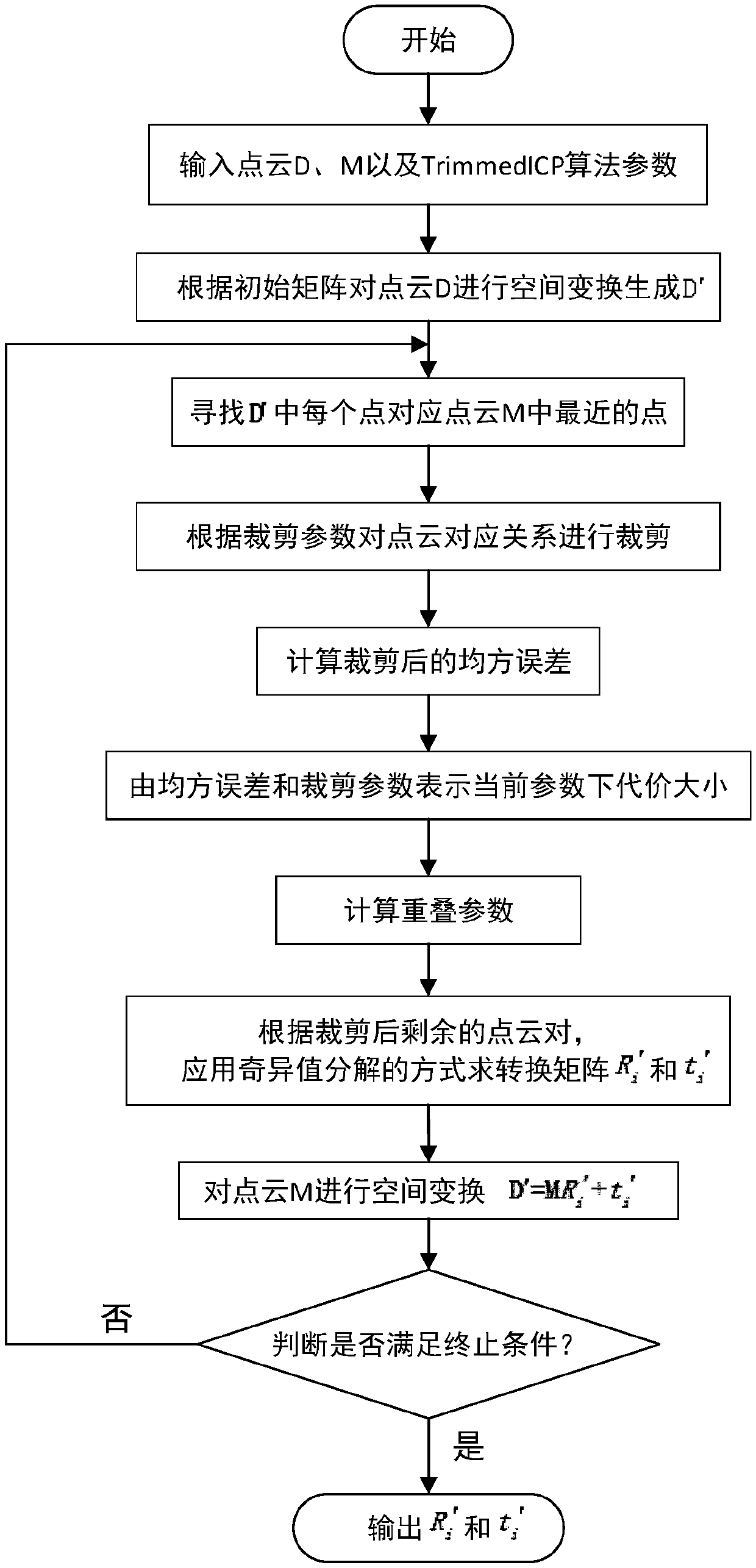
[0035] Such as figure 1 As shown, for a given reference point cloud D and registration point cloud M with a certain degree of overlap, the rotation matrix R is generated through the initialization operation0 and translation matrix t 0 ; Set the initial value R 0 and t 0 Input to the TrimmedICP algorithm to find the precise rotation matrix R under this initial value 0 ’ and the exact translation matrix t 0 ', but R 0 ' and t 0 'It may be a local optimal solution, and the optimal registration cost Cost(0) at this time is obtained; after a generation of differential evolution operation, the updated initial value is obtained: the rotation matrix R 1 and translation matrix t 1 ; The rotation matrix R required for accurate registration is obtained through the TrimmedICP algorithm 1 ′ and the translation matrix t 1 ’, and calculate the optimal registration cost Cost(...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com