


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot and navigation method thereof and computer readable storage medium
A navigation method and robot technology, applied in the field of computer readable storage medium, robot and its navigation method, can solve problems such as difficulty, large amount of calculation, robot sensor affecting path planning, etc., achieve efficiency improvement, smooth operation, and solve local navigation problems effect of the problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
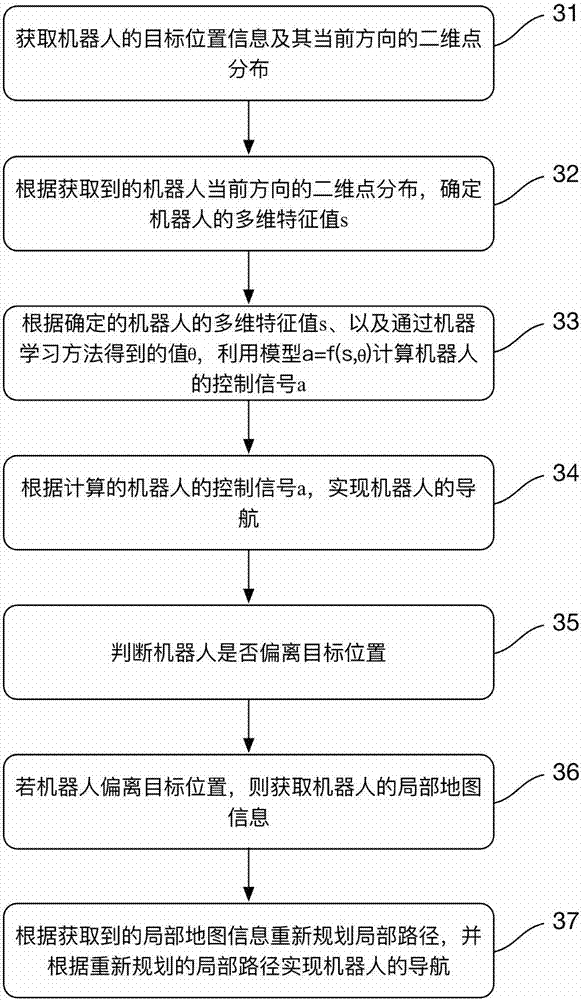
[0039] like figure 1 As shown, the first embodiment of the present invention provides a robot navigation method, the method includes steps:
[0040] 31. Obtain the target position information of the robot and the two-dimensional point distribution of its current direction;
[0041] In this embodiment, the two-dimensional point distribution may be a radial distribution with multiple grids, and the number of grids is not limited here. E.g Figure 5 The two-dimensional point distribution of is a radial distribution of 24 grids.
[0042] In this embodiment, the current two-dimensional point distribution of the robot is determined through the following steps (not shown in the drawings):
[0043] Obtain the current depth image of the robot;
[0044] Extracting a visual three-dimensional point cloud of the robot's current direction according to the acquired current depth image of the robot;
[0045] The extracted visual 3D point cloud is projected onto a plane to form the curren...
no. 2 example
[0075] refer to Figure 4 , Figure 4 A robot is provided for the second embodiment of the present invention, the robot 40 includes: a memory 41, a processor 42 and a robot navigation program stored on the memory 41 and operable on the processor 42, the robot When the navigation program is executed by the processor 42, the steps of the robot navigation method described in the first embodiment are implemented.
[0076] by Figure 5 , Image 6 For example:
[0077] Please refer to Image 6 As shown, the star in the figure is the target position, the rectangular frame is the obstacle, the dotted line in the figure is the walking route of the robot before the implementation, and the solid line in the figure is the walking route of the robot after the implementation.
[0078] The realization process of the robot walking route (solid line):
[0079] Obtain the target position information of the robot and the two-dimensional point distribution of its current direction;
[0080...
no. 3 example
[0089] The third embodiment of the present invention provides a computer-readable storage medium, where a robot navigation program is stored on the computer-readable storage medium, and when the robot navigation program is executed by a processor, the robot navigation as described in the first embodiment is realized method steps.
[0090] As an example, combining Figure 5 , Image 6 Be explained:
[0091] Please refer to Image 6 As shown, the star in the figure is the target position, the rectangular frame is the obstacle, the dotted line in the figure is the walking route of the robot before the implementation, and the solid line in the figure is the walking route of the robot after the implementation.
[0092] The realization process of the robot walking route (solid line):
[0093] Obtain the target position information of the robot and the two-dimensional point distribution of its current direction;
[0094] According to the obtained two-dimensional point distributi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com