Robot scheduling system and method based on magnetic stripe navigation
A scheduling system and robot technology, applied in the field of robots, achieves the effects of low cost, simple and convenient setting, and improved efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0053] This embodiment provides a robot scheduling system based on magnetic stripe navigation, through which the running path of the robot is scheduled.
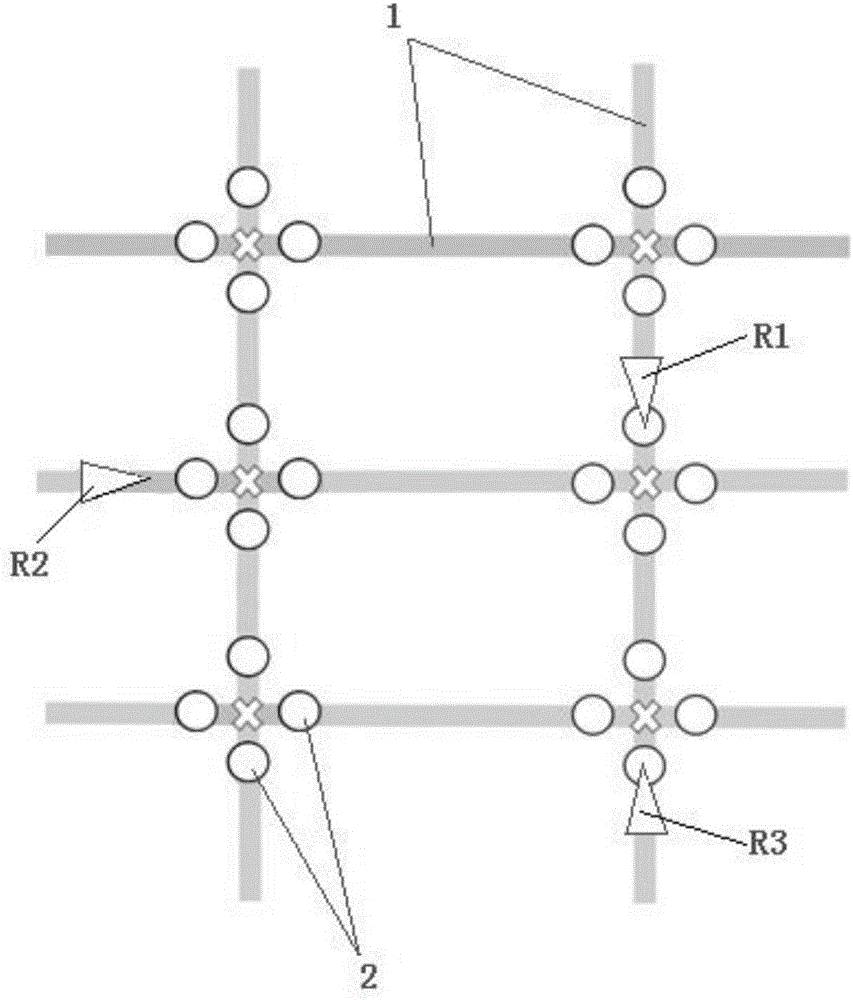
[0054] See figure 1 , the scheduling system provided in this embodiment includes: three robots R1, R2 and R3, and at least four magnetic strips 1 arranged in the space where the three robots are located. In other embodiments, there may be two robots.
[0055] The magnetic strip 1 constitutes the running track of the robot, and the intersection of the magnetic strips 1 is a node, and a magnetic strip 1 with at least one end connected to the node and no other nodes in the middle is a magnetic strip 1 . The four magnetic stripes 1 intersect at a node, and each node is adjacent to and only has four magnetic stripes 1 .
[0056] The three robots R1, R2 and R3 run on the magnetic strip 1, and there is only one starting point for the robots to perform tasks, and there are multiple target points for performing tasks.
[0057] Obs...
no. 2 example
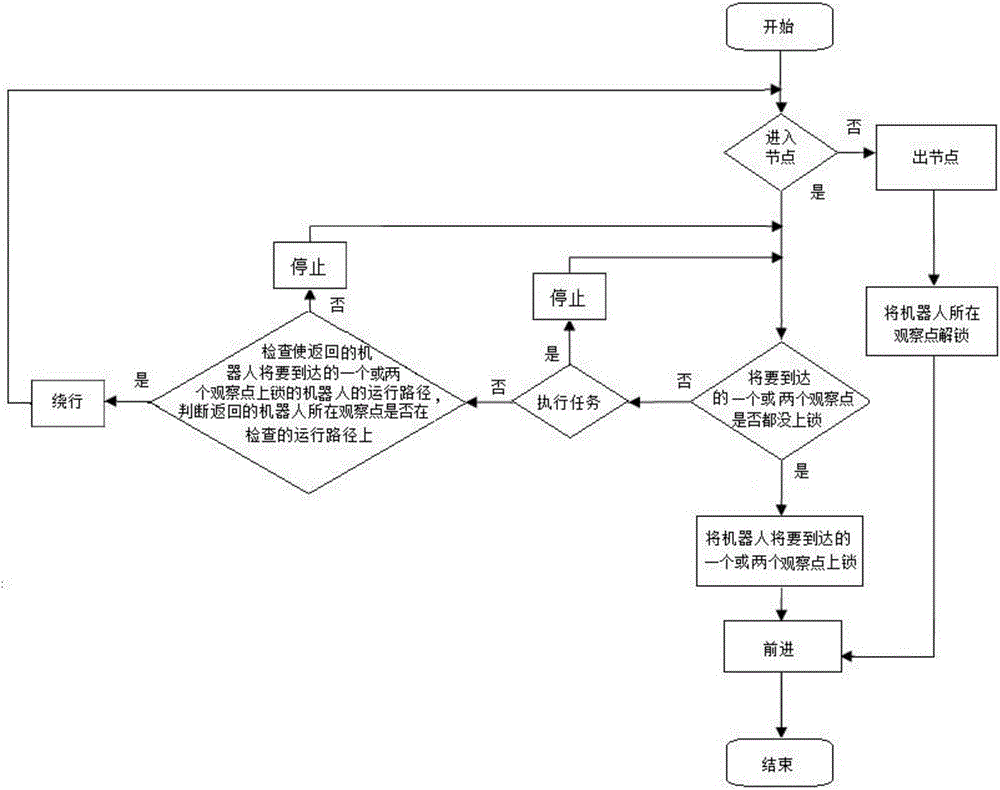
[0067] This embodiment provides a robot scheduling method based on magnetic stripe navigation, and the robot scheduling system based on magnetic stripe navigation in the first embodiment is used to schedule the operation of the robot. The robot runs on the magnetic strip 1 , and the running path of the robot includes a running path for the robot to perform a task and a running path for returning after completing the task.
[0068] See figure 2 , figure 2 It is a flowchart of the robot entering and exiting a node in this embodiment.
[0069] The method provided in this embodiment at least includes the following steps:
[0070] S100, the robot starts from the starting point and performs tasks on the magnetic strip 1 according to a predetermined running path, and before the robot reaches the first observation point 2, the control terminal places the robot on the running path of the task The first observation point 2 is locked, and the robot reaches the first observation poin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com