Model-free self-adaptive control method for attitude of assembled spacecraft
A model-free self-adaptive and control method technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problems that traditional control methods are difficult to use effectively, and combined spacecraft are difficult to accurately model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be further elaborated below by describing a preferred specific embodiment in detail in conjunction with the accompanying drawings.
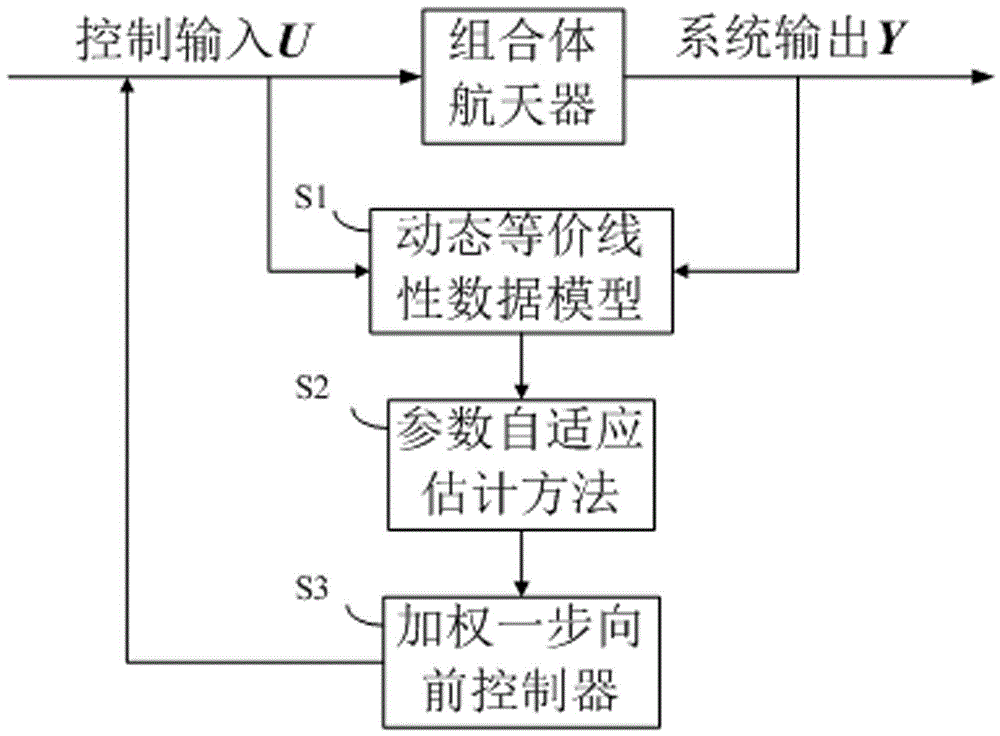
[0026] A model-free adaptive control method for an assembled spacecraft attitude, comprising the following steps:
[0027] S1, aiming at the attitude motion of a general combined spacecraft, establish a full-format dynamic equivalent linear data model, and determine the pseudo-gradient vector form in the model;
[0028] S2, for the pseudo-gradient vector in the full-format dynamic equivalent linear data model, design a parameter adaptive estimation equation to estimate the pseudo-gradient vector;
[0029] In S3, an error criterion function is established according to the dynamic equivalent linear data model, and a weighted one-step forward controller is designed by minimizing the error criterion function.
[0030] S1, assuming that an axial attitude control problem of a combined spacecraft is taken as an example...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com