A two-dimensional route planning method for uuv to circumnavigate circular obstacles geometrically
A circular obstacle, geometric detour technology, applied in vehicle position/route/altitude control, non-electric variable control, instruments, etc., to achieve the effect of easy engineering implementation, small calculation amount, and improved route tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The following examples illustrate the present invention in detail.
[0040] combine figure 1 An environment model for UUV 2D route planning is introduced.
[0041] The environment model of route planning in the present invention adopts a two-dimensional geometric space model. Let the starting point of the planned route be O b , the end point of the route is O e , O b and O e Respectively expressed in two-dimensional coordinates as:
[0042] o b =(x ob ,y ob );O e =(x oe ,y oe ) (1)
[0043] In addition, it is assumed that the current planning point used in each step of the route planning process is O c , expressed in two-dimensional coordinates as:
[0044] o c =(x oc ,y oc ) (2)
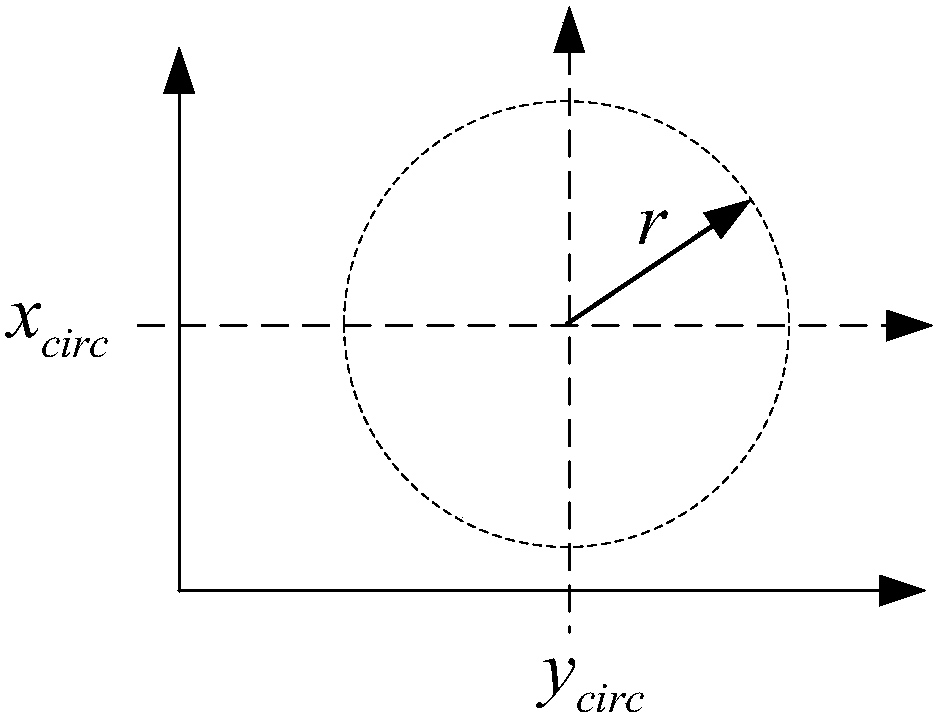
[0045] Suppose there are a certain number of circular obstacles in the two-dimensional geometric space, such as figure 1 As shown, let the circular obstacle be Z circ , which is parameterized as:
[0046] Z circ =(x circ ,y circ ,r) (3)
[0047] In the formula, (x ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com