Route search method of multi-robot scheduling system
A route search and scheduling system technology, applied in the direction of navigation calculation tools, etc., to avoid multi-vehicle conflicts, save search time, and avoid conflicts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
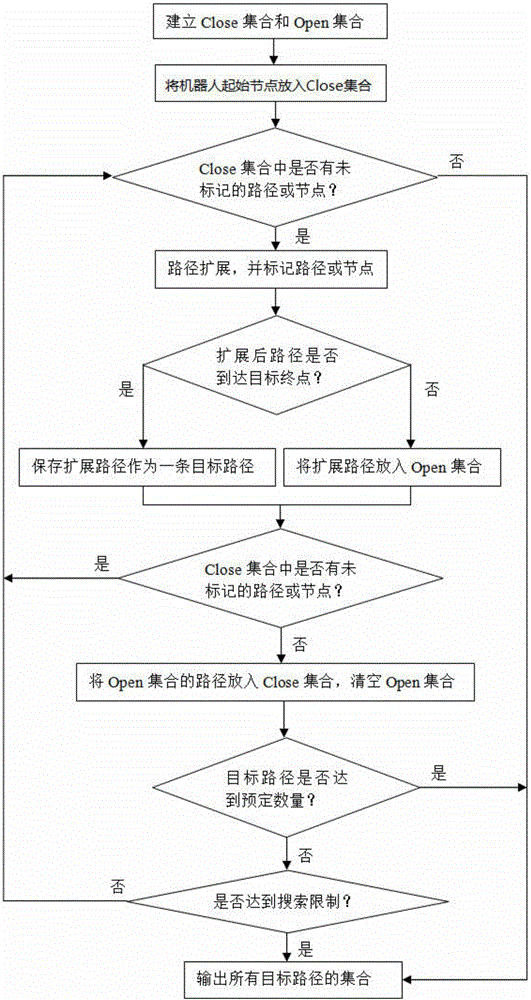
[0043] The purpose of the present invention is to provide a path search method for a multi-robot dispatching system, which can improve the moving speed of the robots as much as possible, and can prevent accidents such as collision or blocking between robots.
[0044] The node in the present invention refers to one of the most basic elements in the terrain element, which is regarded as a coordinate point in the map.
[0045] The short path refers to one of the most basic elements in the terrain element, which is formed by connecting two nodes. On this short path, there are no other nodes between the above two nodes.
[0046] A full path refers to a path formed by a series of nodes and short paths between the start point and the end point specified by the input parameters, but these nodes cannot be repeated.
[0047] A path is a walking route between two nodes, and there are short paths, full paths, and so on.
[0048] Navigation methods mainly refer to visual navigation, laser...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com