Mobile robot indoor route planning method based on array map
A mobile robot and path planning technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of unfavorable implementation, large time and space complexity, high cost, etc., to achieve less hardware cost resources, easy to implement, The effect of reducing human resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0049] The bottom size of the robot is 65cm*50cm, and the height is 100cm. The grid defined by the experimental environment is a 60cm*60cm square. It can be seen that the size of the bottom area of the robot is similar to the size of the grid, which lays a good foundation for the experimental effect.
[0050] Step 1: Train the basic step size of the robot's indoor movement and the rotation radius of turning left and right;
[0051] Step 2: Set the size of the initial default map according to the indoor environment;
[0052] Step 3: Connect the robot control program, set the starting point and end point of robot navigation, and start the robot's autonomous navigation;
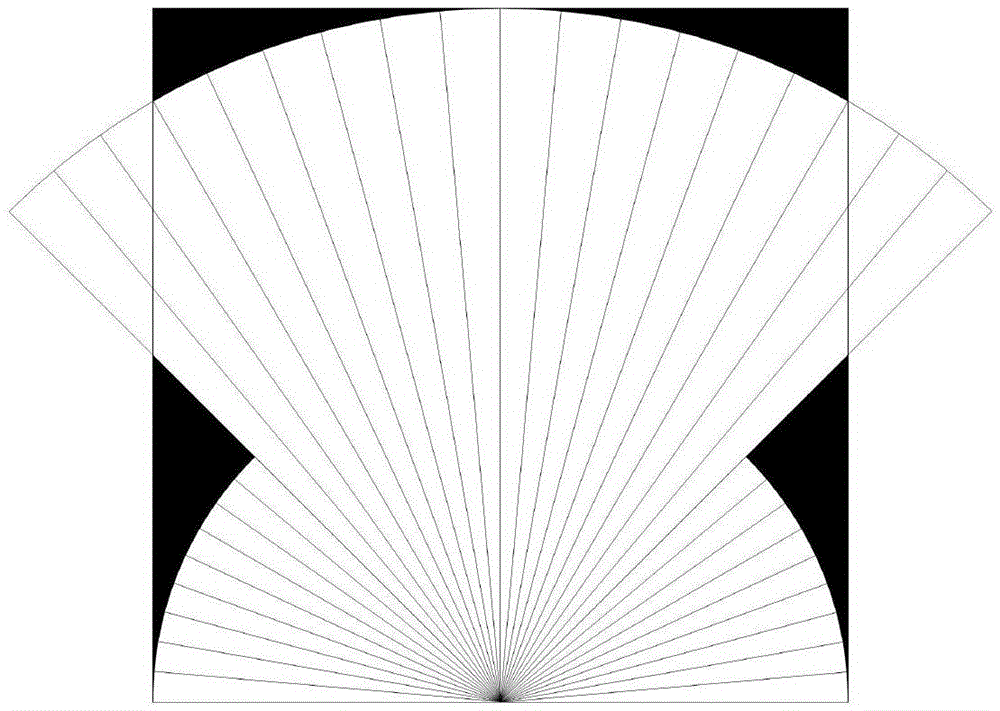
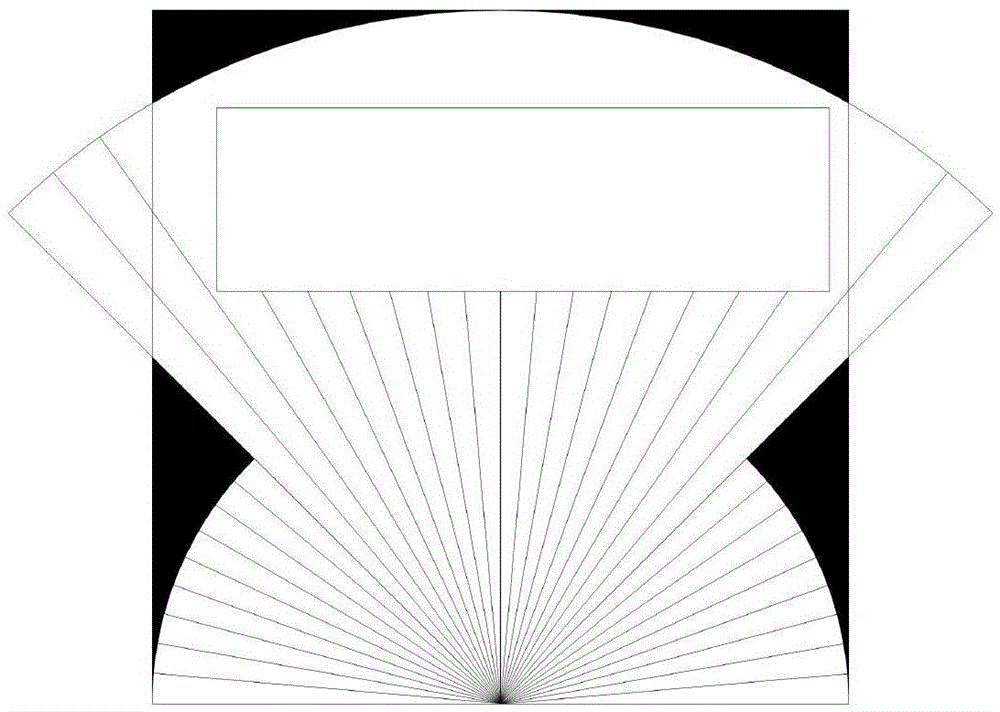
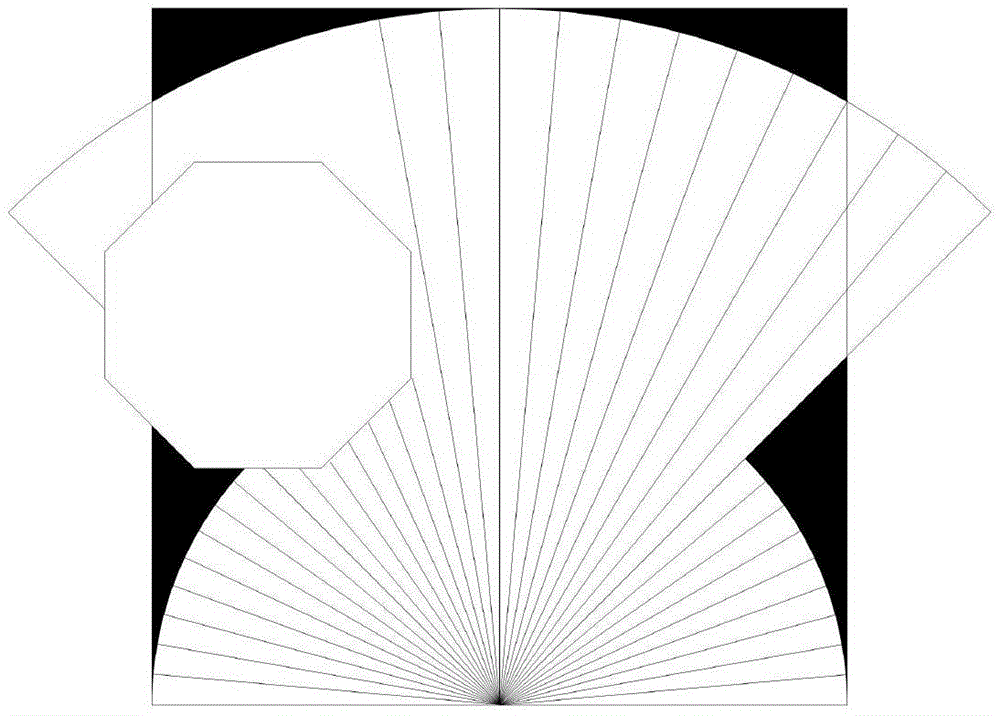
[0053] Step 4: Based on the above path planning algorithm, the robot searches for the local optimal point at the four grid positions with a step size of 1 in the neighborhood...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com