Mechanical leg controlled through thoughts of user and rehabilitation walking method
A technology of mind control and robot legs, which is applied in the field of smart wearable systems, can solve the problems of heavy weight, large power output, and many parts required, and achieve the effects of light weight, reduced burden, and small footprint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
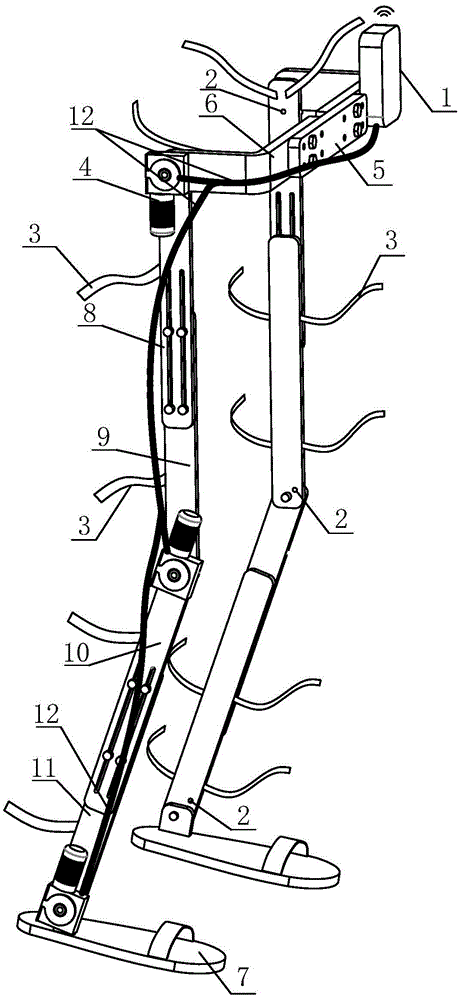
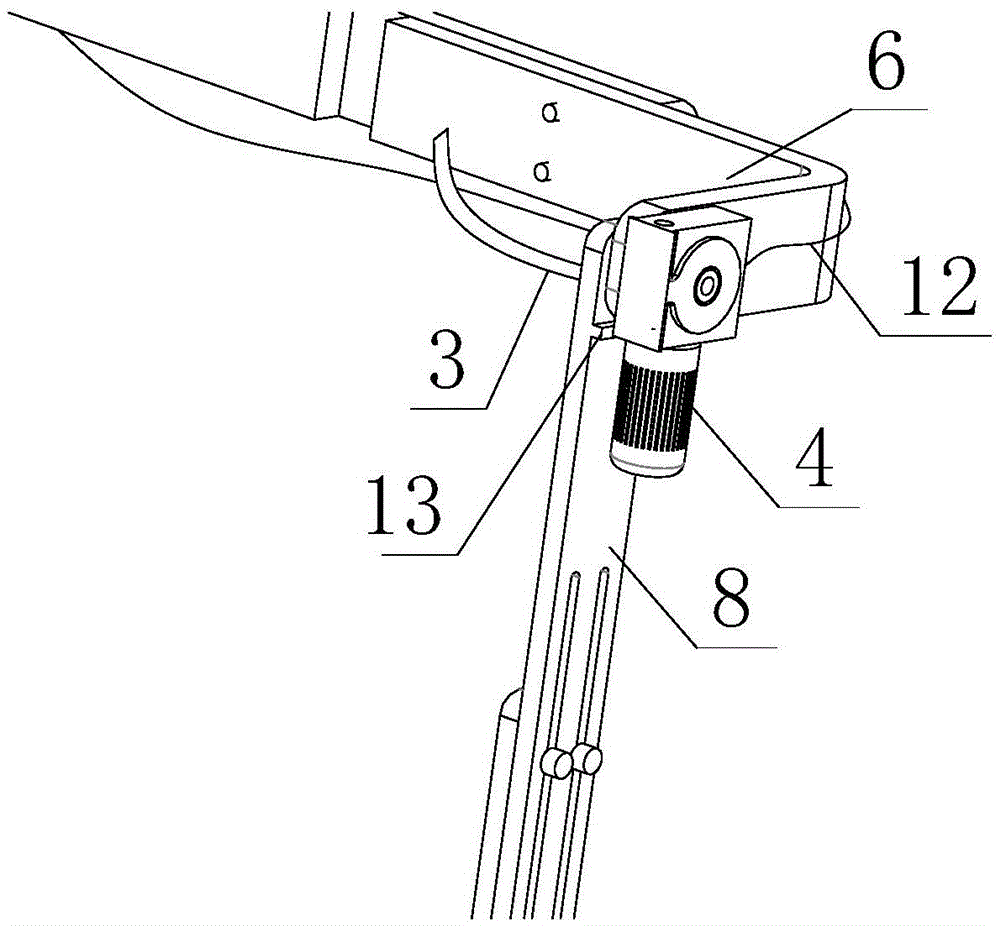
[0036] Human thoughts control the robot leg, including control device 1, active sensor 2, single-leg prosthesis, and waist support structure, the single-leg prosthesis is fixed at the lower part of the waist support structure, and several active sensors 2 are arranged on the single leg without worm gear The prosthesis is a freely movable leg, the active sensor 2 communicates with the control device 1, and the control device 1 drives the movement of the single-leg prosthesis. The single-leg prosthesis is fixed to the leg to be rehabilitated by straps 3 . The active sensor 2 is bound on the healthy leg through a strap 3 to collect the movement position information of the healthy leg;figure 1 The middle active sensor 2 is fixed on the single-leg prosthesis without the worm gear motor 4, and the healthy leg is fixed on the single-leg prosthesis without the worm gear motor 4 through the strap 3, so that the active sensor 2 can collect motion information.
[0037] The lumbar support...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com