A Modular Soccer Robot
A football robot, modular technology, applied in the field of robotics, can solve problems such as low flexibility, insufficient kicking power, and lost balls, and achieve the effect of reasonable use of space, convenient assembly and disassembly, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in further detail below in conjunction with the accompanying drawings.
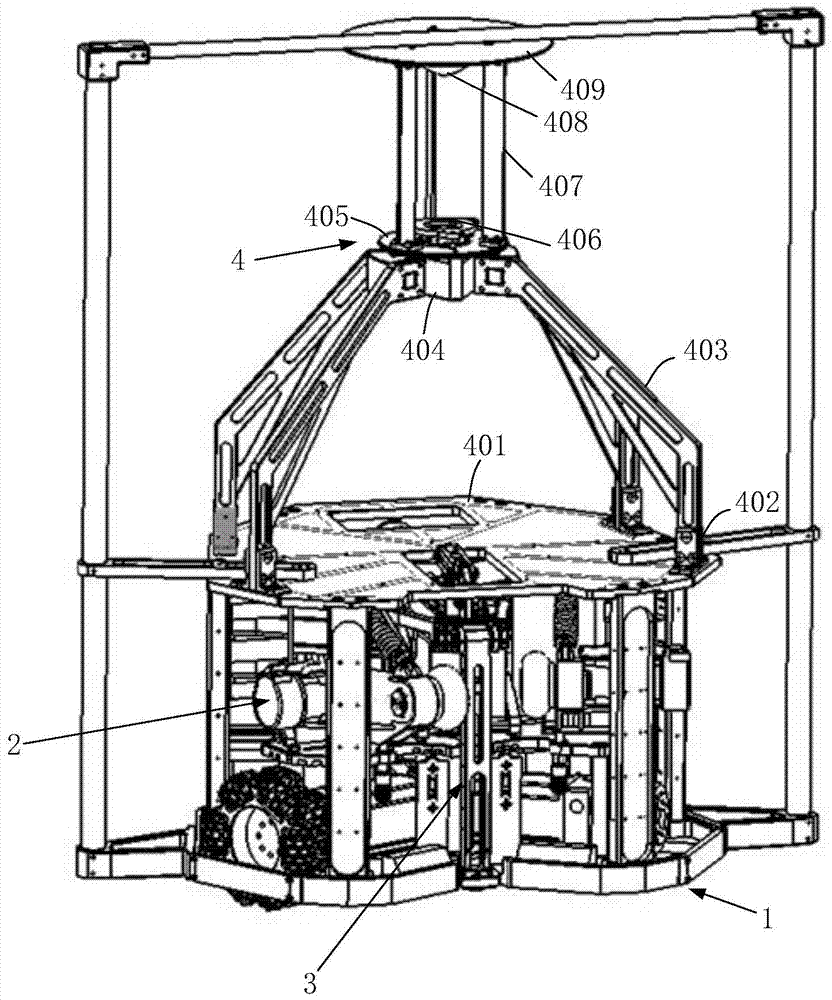
[0044] The modular soccer robot of the present invention adopts a modular design and includes an omnidirectional mobile chassis 1, a ball-carrying device 2, a kicking device 3 and a top-level visual device 4, such as figure 1 shown.
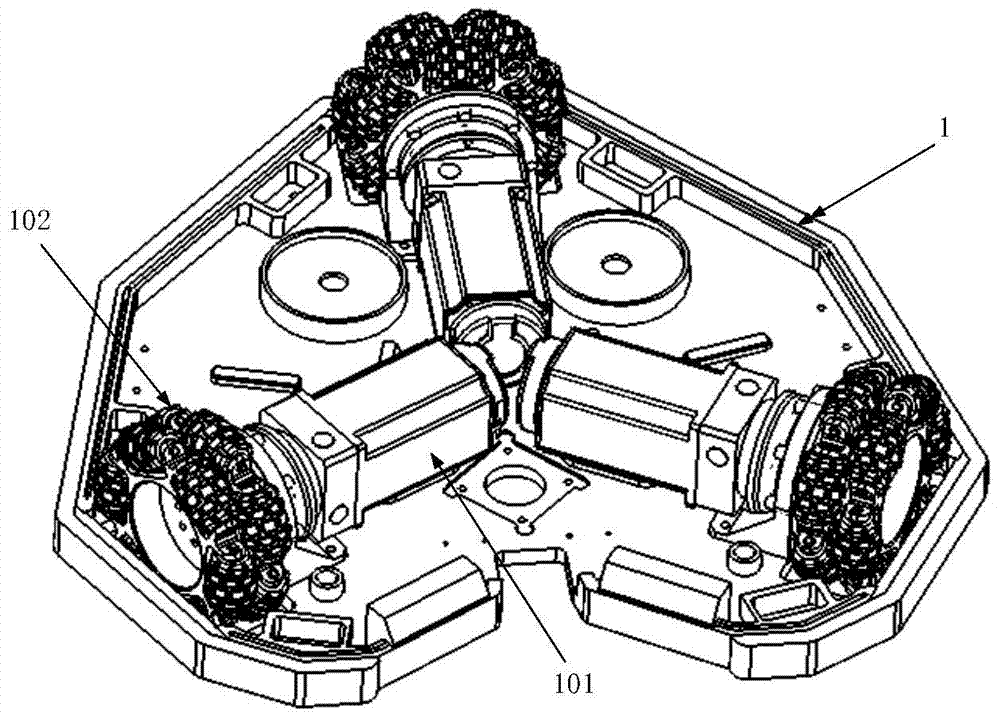
[0045] The omnidirectional mobile chassis 1 is used to support the dribbling device 2, the kicking device 3 and the top-level visual device 4, and the chassis drive motor 101 drives the three omnidirectional wheels 102 installed on the chassis circumferentially to rotate to realize the movement of the soccer robot control, such as figure 2 shown.
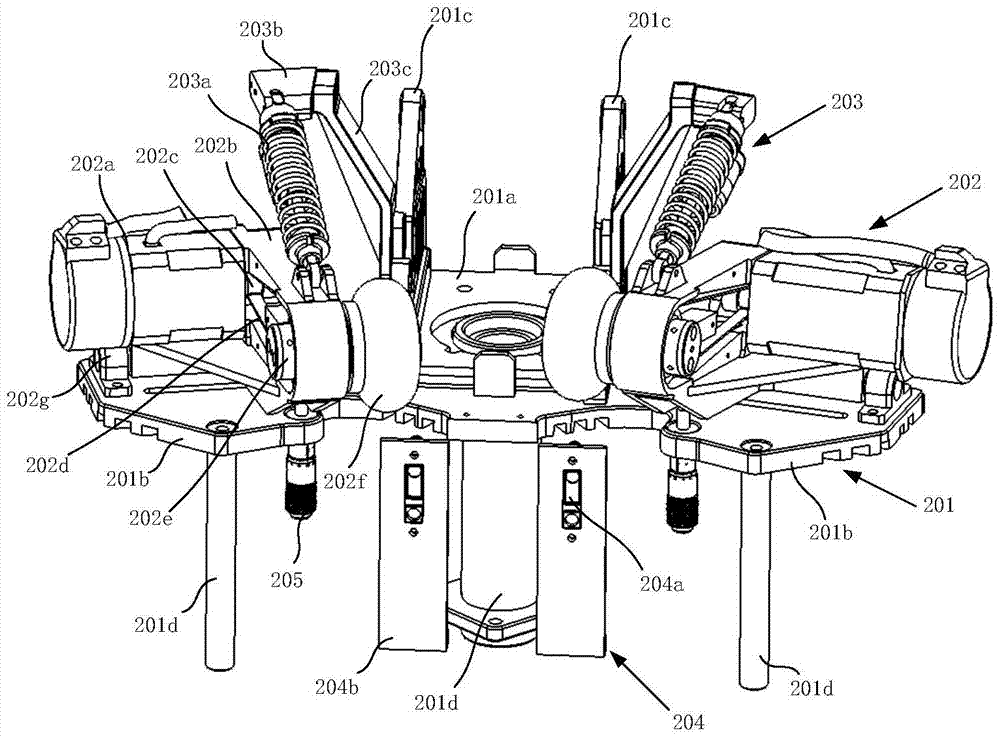
[0046] The dribbling device 2 includes a fixed bracket 201, two sets of transmission mechanisms 202, two sets of spring buffer components 203 and two sets of infrared detection components 204, such as image 3 shown.
[0047] Wherein, the fixed bracket 201 is an integral structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com