A Projection and Stability Control Method for Humanoid Robot Based on Vision and Movement
A humanoid robot and stability control technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems that are not involved, do not consider the impact of robot stability, and cannot complete grasping tasks independently, so as to enhance the operation ability , increase the effect of the application
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
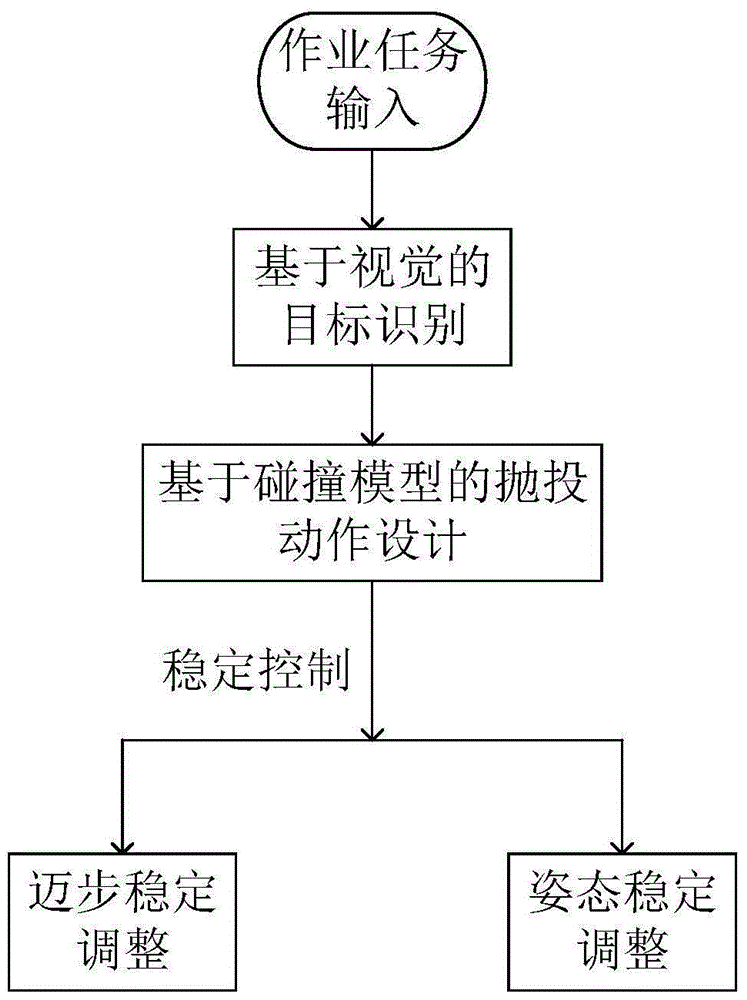
[0035] as attached figure 1 As shown, the overall process:
[0036] 1. Job task input, that is, to formulate the target object that the humanoid robot needs to throw and the target position where the target object needs to be thrown.
[0037] 2. The humanoid robot recognizes the target object according to the binocular vision recognition system, plans the path, and picks up the target object.
[0038] 3. According to the humanoid robot throwing method based on the collision model, the operation task of throwing the target object to the target position is realized, and the stability of the humanoid robot itself is maintained in the process.
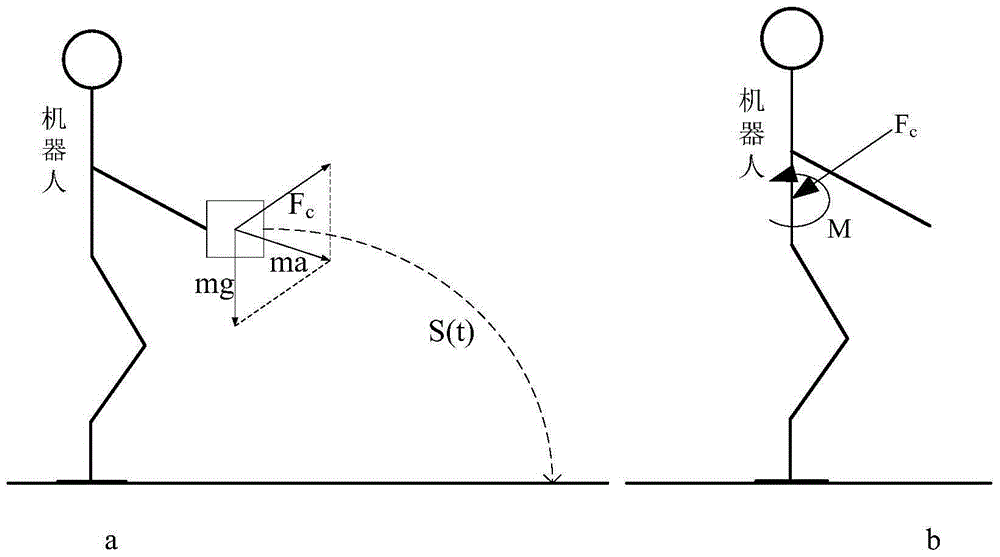
[0039] Throwing Action Design Based on Collision Model
[0040] According to the task and the detailed parameters of the target object, the humanoid robot calculates the arm movement trajectory required by the humanoid robot to complete the task, and analyzes the force when the target object is separated from the robot. The process of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com