Formation control method of distributed multi-mobile robot based on nash iteration
A mobile robot and control method technology, applied in two-dimensional position/channel control and other directions, to achieve good anti-disturbance ability, reduce the amount of calculation and communication.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings.
[0030] refer to figure 1 , a distributed multi-mobile robot formation control method based on Nash iteration, including the following steps:
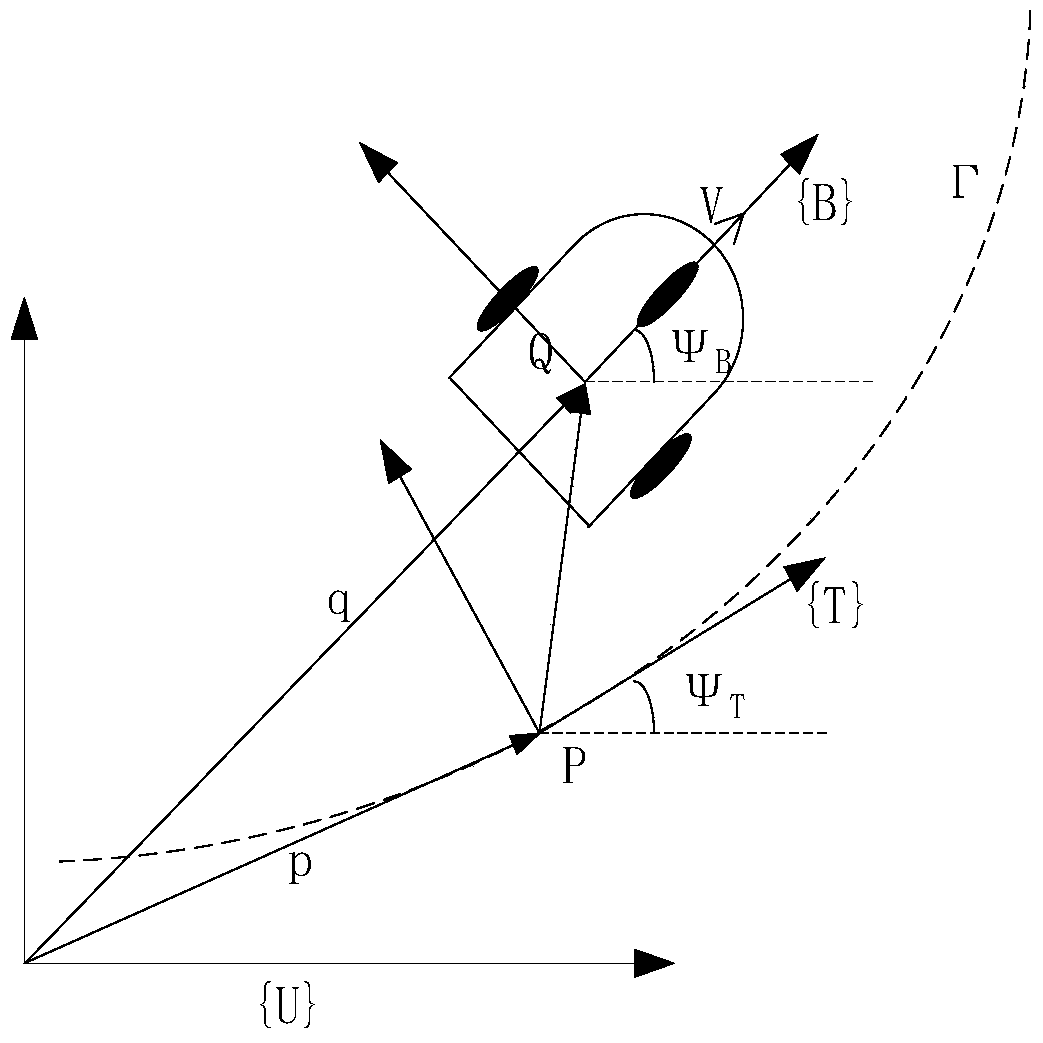
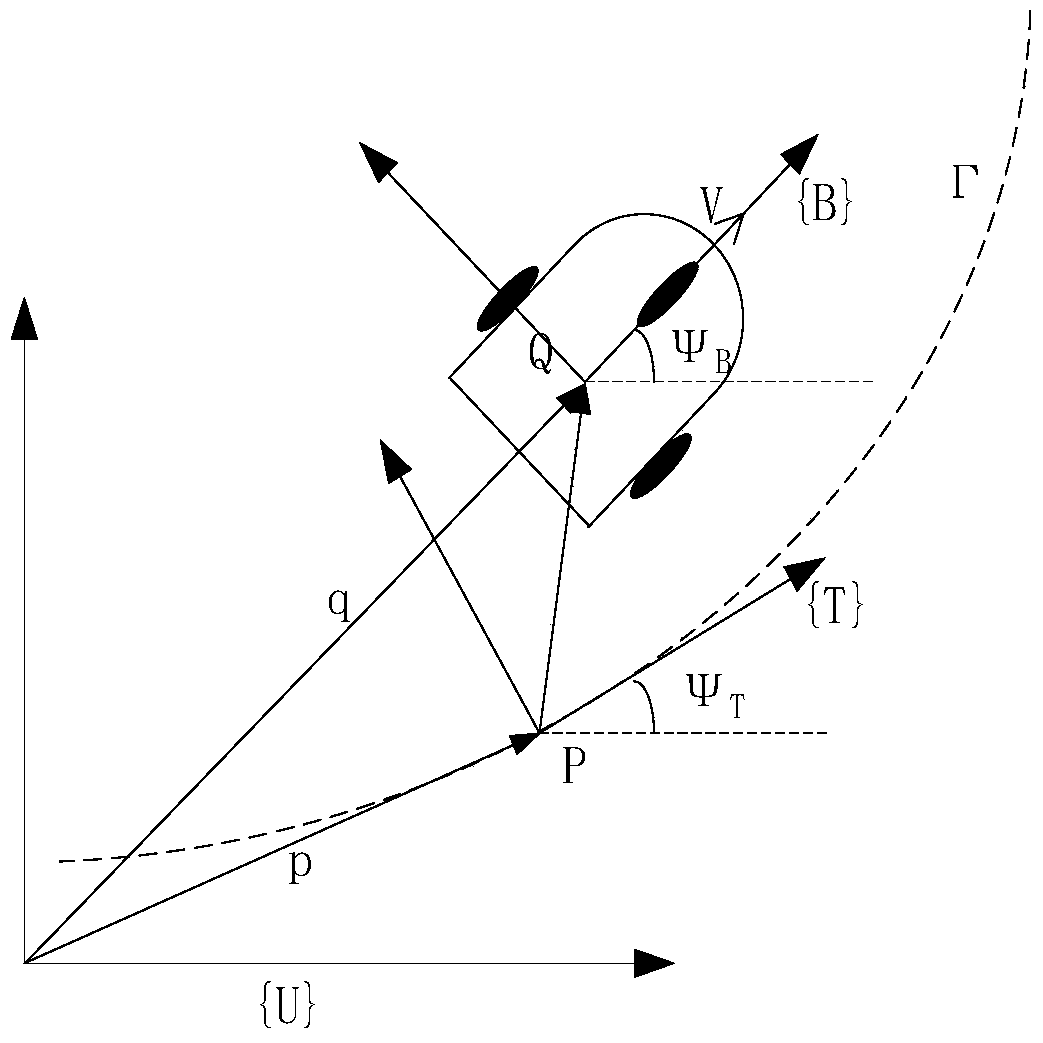
[0031] 1) Modeling the mobile robot: refer to figure 1 , taking the three-wheeled mobile robot as the object, the continuous system deviation model of a single mobile robot i is:
[0032]
[0033]
[0034] Among them, (x e,i ,y e,i ,α e,i ) represents the orientation deviation of the mobile robot i relative to the virtual mobile robot i, including the deviation x on the x and y axes e,i ,y e,i and the angular deviation α of the running line speed e,i , the virtual mobile robot is a hypothetical mobile robot running on the reference trajectory according to the set running state, assuming that the virtual mobile robot i is near the tracking point P, and the curvature at point P is k P,i , k(s i) is the curvature of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com