A variable palm-type flexible robotic gripper capable of passive envelope
A flexible, palm-based technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems that the manipulator claws cannot meet complex and changeable grasping requirements, and achieve reduced production costs, high grasping stability, and institutional structure simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
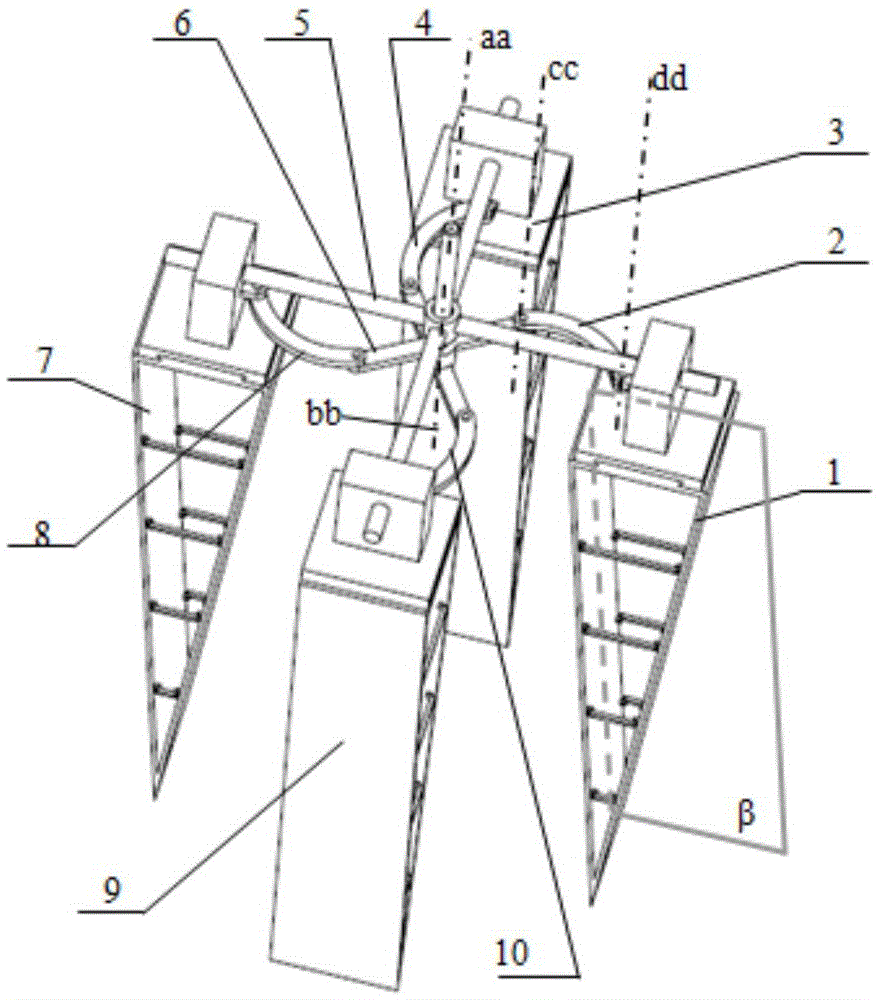
[0024] This embodiment provides a variable palm-type flexible robotic gripper that can realize passive envelope, mainly including a driving platform, a guiding and positioning platform, four passive fingers and four active branch chains, and the four active branch chains will drive the platform, Guided positioning platform and four passive fingers connected.
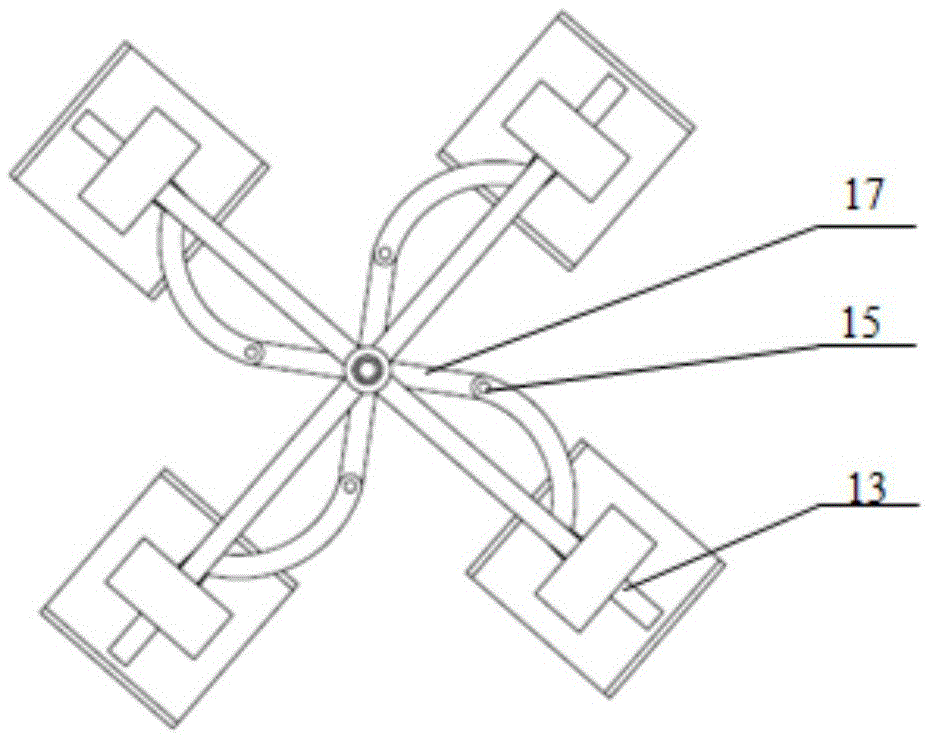
[0025] The driving platform is composed of a centrally symmetrical cross rod and a cylindrical rod perpendicular to the cross rod, and the cylindrical rod is fixedly connected to the symmetrical center of the cross rod. The drive platform can rotate around the axis of the cylindrical rod under the drive of the motor.
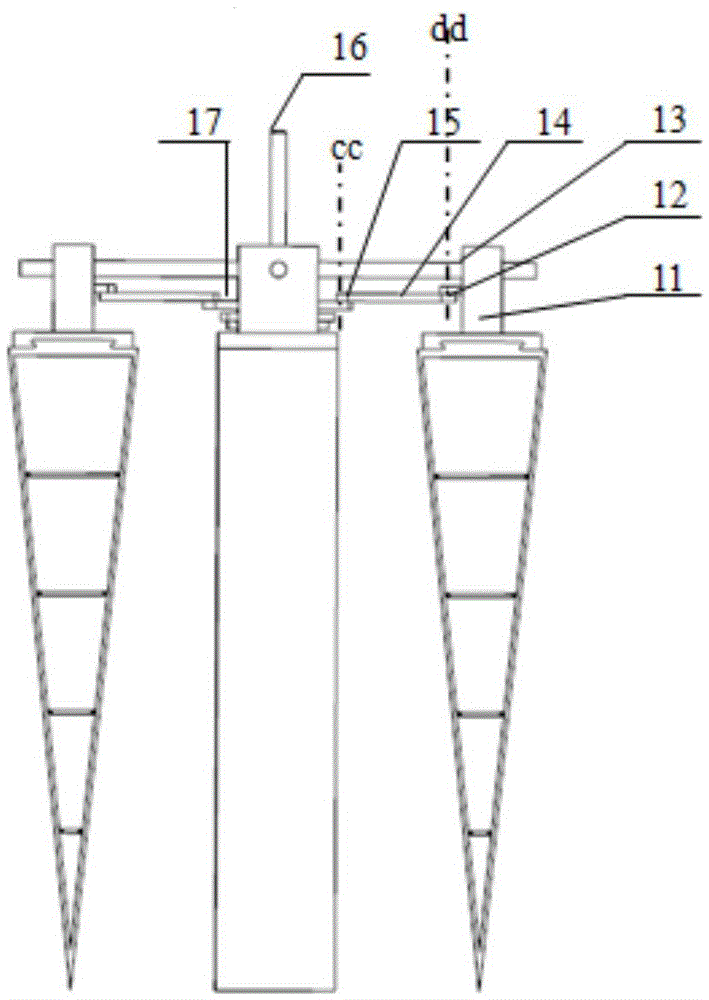
[0026] The guiding and positioning platform is a centrally symmetrical cross rod structure, and the cylindrical rod of the driving platform vertically passes through the symmetrical center of the cross rod structure.
[0027] The structures of the four active branch chains are exactly the same, and they a...
Embodiment 2
[0034] Such as Figure 1 to Figure 3 As shown, this embodiment provides a variable palm-type flexible robotic gripper capable of realizing passive envelope, which is mainly composed of a variable palm and four passive fingers. The variable palm includes a driving platform 6 , a guiding and positioning platform 5 , a first active branch chain 2 , a second active branch chain 4 , a third active branch chain 8 and a fourth active branch chain 10 . The four passive fingers include a first passive finger 1 , a second passive finger 3 , a third passive finger 7 and a fourth passive finger 9 .
[0035]The driving platform 6 is composed of a cross bar 17 and a cylindrical bar 16; the center of the cross bar 17 is symmetrical, and is composed of two straight bars connected vertically to each other; the cylindrical bar 16 is perpendicular to the plane where the cross bar 17 is located, and one end is fixedly connected At the center of symmetry of the cross bar 17. The cylindrical rod ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com