Supercharge Your Innovation With Domain-Expert AI Agents!
A moving robot with three degrees of freedom
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
A technology for handling robots and moving supports, applied in the field of robotics, can solve problems such as difficult to guarantee position and attitude accuracy, high manufacturing cost of five-axis robots, and narrow working space range of the mechanism, so as to achieve clear motion trajectory and position accuracy, simple structure, The effect of low inertia
Inactive Publication Date: 2016-07-06
FUJIAN PROVINCE HUALONG MACHINERY
View PDF7 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0002] In the automated production lines of light industry, medicine, food and electronics industries, such as sorting, packaging and packaging, especially in repetitive, boring and dangerous tasks such as material handling and machine tool loading and unloading, in order to reduce human labor Intensity, improve work efficiency, in the operation process, it is often necessary to place repetitive work robots in the space, but it is unnecessary to use multi-degree-of-freedom space parallel manipulators, or the manufacturing cost is too high, such as the traditional SCARA robot due to its own Factors, three motors and a ball screw are installed on the small arm, which limits its range of action, and the manufacturing cost of the serial five-axis robot is too high
However, in the translational parallel robot mechanism, the method of connecting the actuator on the moving platform to the motor on the frame through the transmission shaft reduces the working space of the mechanism, limits the acceleration of the end effector, and makes the position and attitude Accuracy is difficult to guarantee
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
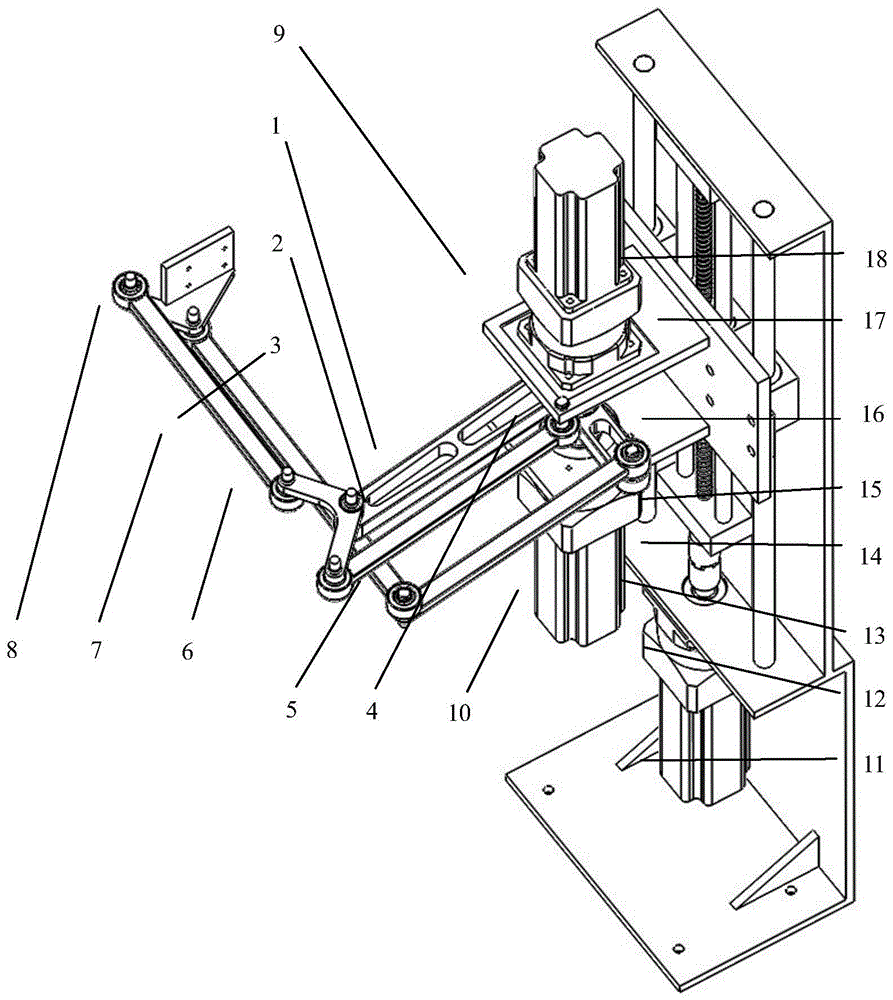
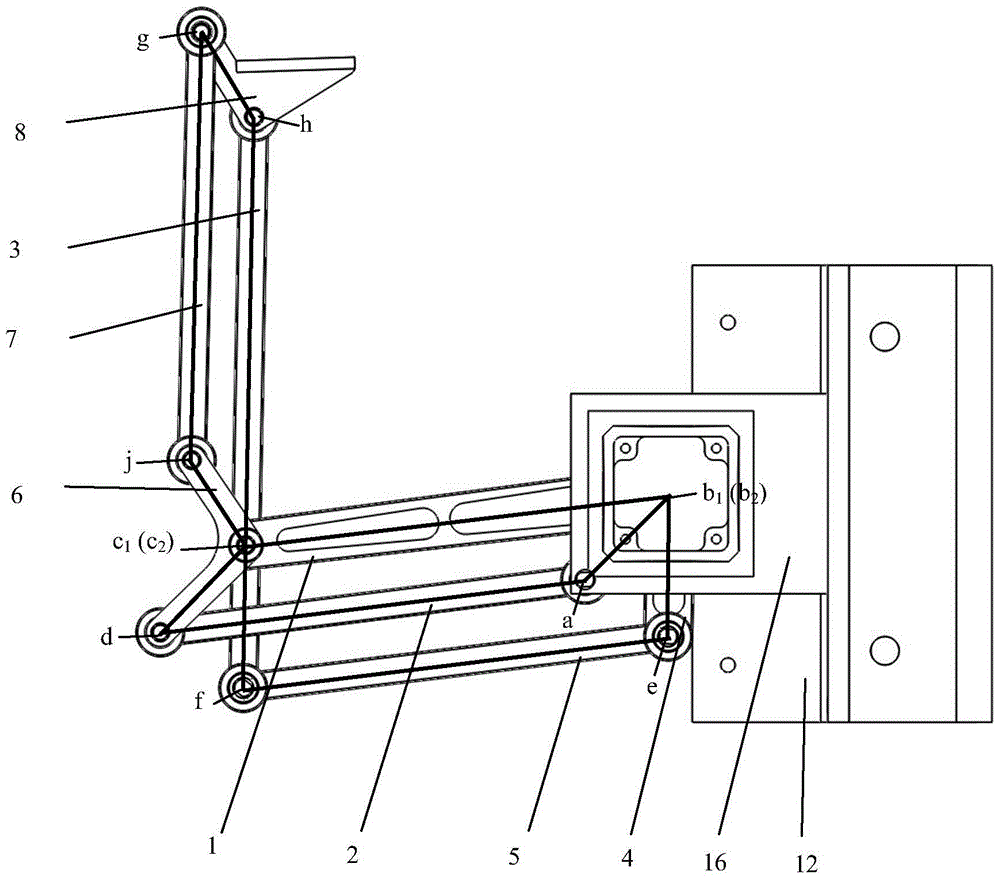
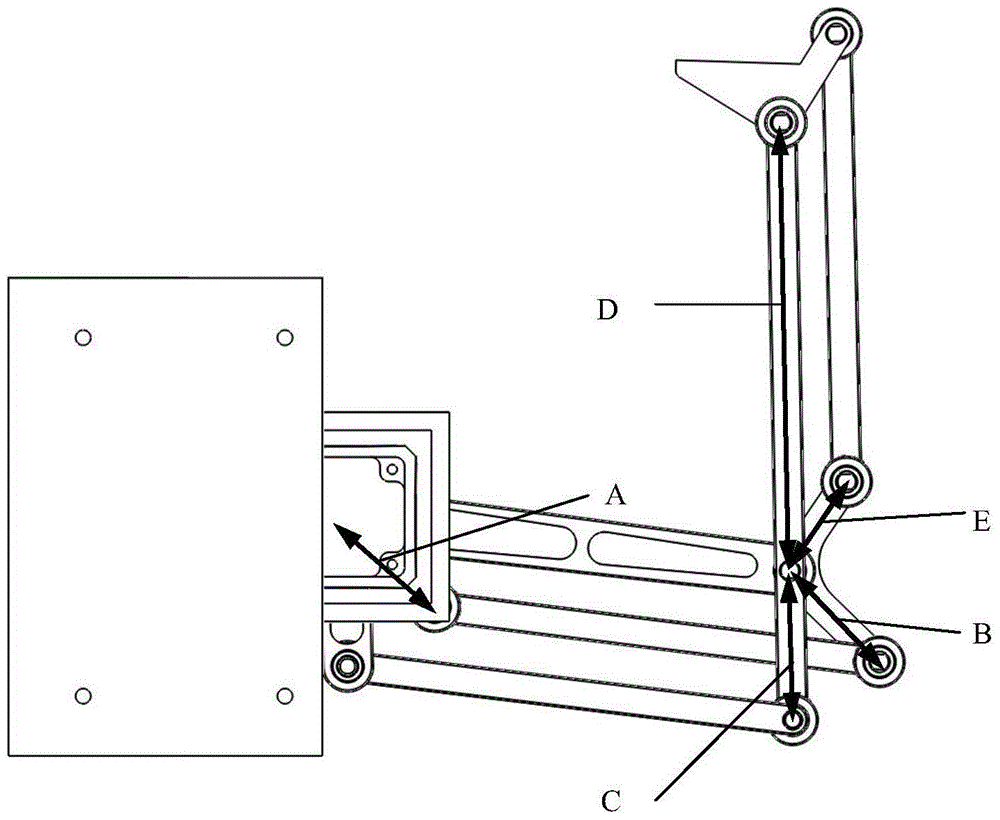
[0025] like figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 As shown, a moving frame three-degree-of-freedom handling robot includes a frame 12 , a ball screw linear slide table, a moving frame 16 , a driving device, a motion branch chain, and a moving platform 8 . The driving device includes a first driving device 9, a second driving device 10, and a third driving device 11; the ball screw linear slide table includes a base 14, a slider 17, a screw 18, and a slide rod 15, and the ball screw linear slide table drives The moving bracket 16 moves in the vertical direction; the motion branch chain includes the first active branch chain, the second active branch chain and the driven branch chain, and the interaction between the active branch chain and the driven branch chain drives the translational movement of the moving platform 8 . ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a three-degree-of-freedom transfer robot with a movable support and belongs to the technical field of robots. The robot comprises a machine frame, the movable support, a movable platform, a ball screw linear sliding table, a first driving branch chain, a second driving branch chain, a driven branch chain, a first driving device, a second driving device and a third driving device. The first driving branch chain comprises the movable support, a first driving arm, a first posture maintaining connecting rod and a posture maintaining rod. The second driving branch chain comprises a first driving arm, a second driving arm, a driven arm and a small arm connecting rod. The driven branch chain comprises the movable platform, a driven arm, a posture maintaining rod and a second posture maintaining connecting rod. The ball screw linear sliding table comprises a base, a sliding block, a lead screw and a sliding rod. According to the three-degree-of-freedom transfer robot with the movable support, the flexibility of a mechanism can be effectively improved, and the parallel robot mechanism is simplified; meanwhile, advantages of the mechanism that the inertia is small, the speed is high, the accelerated speed is high, the positioning precision is high, and repeated positioning can be achieved are well maintained.
Description
Technical field: [0001] The invention belongs to the technical field of robots, and in particular relates to a three-degree-of-freedom handling robot of a movable support. Background technique: [0002] In the automated production lines of light industry, medicine, food and electronics industries, such as sorting, packaging and packaging, especially in repetitive, boring and dangerous tasks such as material handling and machine tool loading and unloading, in order to reduce human labor Intensity, improve work efficiency, in the operation process, it is often necessary to place repetitive work robots in the space, but it is unnecessary to use multi-degree-of-freedom space parallel manipulators, or the manufacturing cost is too high, such as the traditional SCARA robot due to its own Factors, three motors and a ball screw are installed on the arm, which limits its range of action, and the manufacturing cost of the serial five-axis robot is too high. However, in the translatio...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.

 Login to View More
Login to View More  Login to View More
Login to View More