Edge-matching-based relative pose calibration method of laser range finder and camera
A technology of laser range finder and relative pose, which is applied in the direction of instruments, measuring devices, and photo interpretation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] According to the method for calibrating the relative pose of the laser rangefinder and the camera based on edge matching in the present invention, after calibration, the point cloud collected by the laser rangefinder can accurately correspond to the image collected by the camera. On the one hand, the image can color the point cloud to obtain a colored point cloud, or paste a colored texture on the surface mesh with the point cloud as the vertex to obtain a textured surface model; on the other hand, the point cloud can indicate the depth of a part of the image area, Provide support for applications such as image-based recognition and positioning.
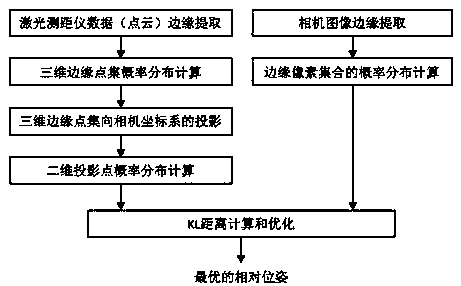
[0049]When calibrating, let the laser rangefinder and camera collect data at the same time, and ensure that most of their observation ranges overlap, process the point cloud collected by the laser rangefinder and the image collected by the camera, and get the laser rangefinder and camera online relative pose.
[0050] Such as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com