Decoupled quick change surgical device for robot assisted minimally invasive surgery
A robot-assisted, minimally invasive surgery technology, applied in the fields of surgery, application, medical science, etc., can solve problems that affect the quality of surgery, complex structure, easy to break wires, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
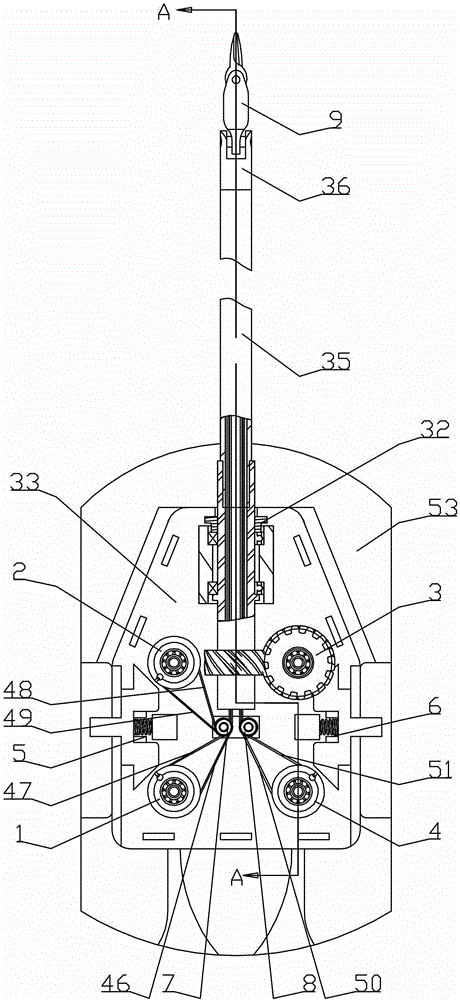
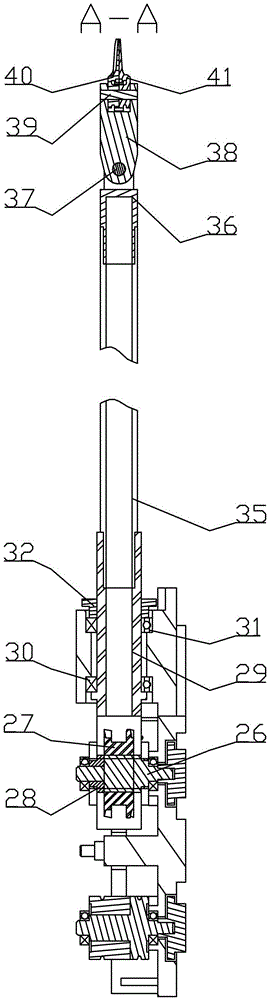
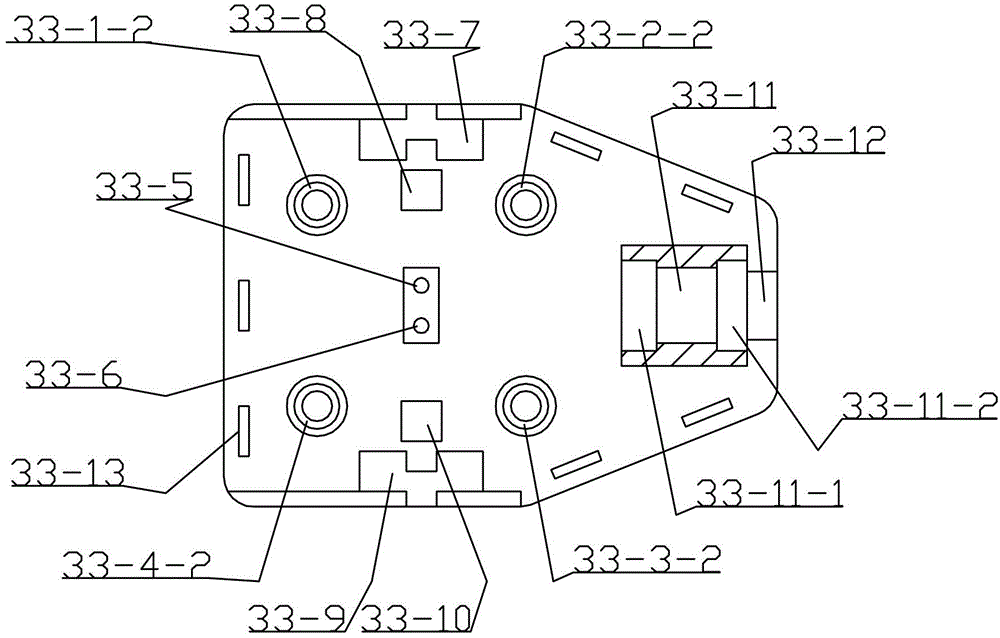
[0007] Specific implementation mode one: combine Figure 1 to Figure 28 Describe this embodiment, the non-coupling quick-change surgical device for robot-assisted minimally invasive surgery described in this embodiment includes an upper blade transmission mechanism 1, a wrist transmission mechanism 2, a cannula transmission mechanism 3, a lower blade transmission mechanism 4, a first Reset mechanism 5, second reset mechanism 6, first guide mechanism 7, second guide mechanism 8, front-end surgical scissors mechanism 9, adapter housing 33, adapter upper cover 34, sleeve tube 35, wrist connector 36, upper blade Traction lower steel wire 46, upper blade traction upper steel wire 47, wrist traction lower steel wire 48, wrist traction upper steel wire 49, lower blade traction lower steel wire 50, lower blade traction upper steel wire 51 and seven screws 52, upper blade transmission mechanism 1 , wrist transmission mechanism 2, sleeve transmission mechanism 3, and lower blade transmi...
specific Embodiment approach 2
[0010] Specific implementation mode two: combination Figure 8 with Figure 9 Describe this embodiment, the upper blade transmission mechanism 1 of the non-coupling quick-change surgical device for robot-assisted minimally invasive surgery described in this embodiment includes an upper blade transmission clutch disc 10, an upper blade transmission rear bearing 11, an upper blade transmission offline wheel shaft 12. Upper blade drive upper wire pulley 13, upper blade drive front bearing 14 and three upper blade drive mechanism set screws 15, upper blade drive lower wire wheel shaft 12 from back to front are made of an integrated upper blade drive lower wire wheel shaft One section 12-1, the second section 12-2 of the upper blade driving the offline axle, the third section 12-3 of the upper blade driving the offline axle, the four sections 12-4 of the upper blade driving the offline axle, and the five sections 12 of the upper blade driving the offline axle -5 composition, the u...
specific Embodiment approach 3
[0012] Specific implementation mode three: combination Figure 25 with Figure 26 Describe this embodiment, the wrist transmission mechanism 2 of the non-coupling quick-change surgical device for robot-assisted minimally invasive surgery described in this embodiment includes a wrist transmission clutch disc 54, a wrist transmission rear bearing 55, and a wrist transmission offline wheel shaft. 56. Wrist drive upper wire pulley 57, wrist drive front bearing 58 and three wrist drive mechanism set screws 59, wrist drive offline wheel shaft 56 from front to back in turn supported by one section of wrist drive offline wheel shaft 56-1, the second section of the wrist drive offline wheel shaft 56-2, the third section of the wrist drive offline wheel shaft 56-3, the fourth section of the wrist drive offline wheel shaft 56-4 and the fifth section of the wrist drive offline wheel shaft 56- 5 components, the third section 56-3 of the wrist drive offline wheel shaft is the drive offline...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com