Ducted unmanned aerial vehicle anti-sway method based on optimized quadratic form control of artificial bee colony
An artificial bee colony optimization, unmanned aerial vehicle technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The performance of the ducted unmanned aerial vehicle swing elimination method based on artificial bee colony optimization quadratic control proposed by the present invention will be verified through specific application examples below. A certain type of single-rotor ducted UAV is used as the verification object. The experimental environment is 3.07Ghz, 4G memory, MATLAB 2010a version.
[0096] See Figure 5 , the present invention is based on the artificial bee colony optimization secondary control ducted unmanned aerial vehicle pendulum elimination method, and its specific implementation steps are as follows:
[0097] Step 1: Establishment of the pendulum oscillation mathematical model:
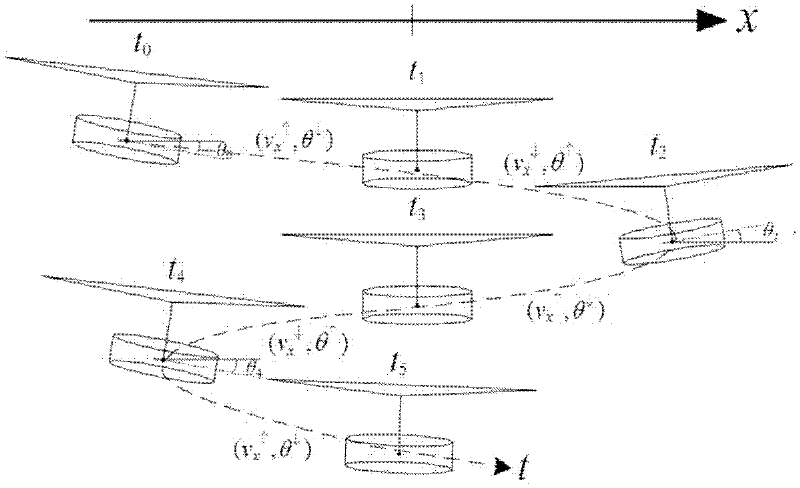
[0098] (1) Establishment of nonlinear mathematical model of pendulum oscillation
[0099] Using the aerodynamic data and physical equations of the ducted UAV, a nonlinear mathematical model of the pendulum oscillation phenomenon in the hovering state was established (1);
[0100]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com